Controladores y sensores
Los controladores y sensores son partes importantes del sistema de control; sin información del sensor, el controlador no puede tomar una decisión e indicar a la válvula que se mueva. Este tutorial discute brevemente los diferentes tipos de controladores y sensores disponibles y cómo operan. También se da una breve explicación de las señales de control digitales y analógicas.
Controladores Es importante declarar desde el principio que no todas las aplicaciones de control necesitan un controlador sofisticado.
Una válvula de encendido/apagado y actuador, por ejemplo, pueden operarse directamente desde un termostato. Otro ejemplo es la operación de controles de seguridad de límite alto, que tienen una acción ‘instantánea’ para cerrar válvulas o para apagar los suministros de combustible.
Sin embargo, cuando los requisitos de control se vuelven más sofisticados, se necesita un controlador para satisfacer estos requisitos.
El controlador recibe una señal, decide qué acción se necesita y luego envía una señal al actuador para que se mueva.
En la era del microchip, los circuitos integrados y las computadoras, las funciones realizadas por el controlador pueden ser muy complejas.
Sin embargo, ya que se ha hecho una analogía entre el cerebro humano y los controladores/computadoras en Módulos anteriores, se puede parafrasear el lema conocido de IBM:
Computadora - Rápida, precisa y estúpida
Ser humano - Lento, descuidado y brillante
En resumen, el controlador no resolverá todos los problemas. Debe ser correctamente seleccionado y puesto en servicio, temas que se tratarán más adelante.
Aunque la mayoría de los controladores son ahora electrónicos basados en digital/microprocesador, una gama de controladores neumáticos está disponible comercialmente. Estos podrían usarse en áreas peligrosas donde el riesgo de explosión impide el uso de electricidad/electrónica. Es posible hacer que el equipo eléctrico sea ‘intrínsecamente seguro’ o a prueba de explosiones o llamas, sin embargo, generalmente hay una implicación de coste sustancial.
Como se mencionó anteriormente, las funciones realizadas por el controlador pueden ser muy complejas y está fuera del alcance de esta publicación enumerarlas en detalle, o explicar cómo operan.
Las principales variaciones que requieren consideración son las siguientes:
Controlador de lazo simple
Opera una válvula/actuador desde un solo sensor.
Controlador de múltiples lazos
Puede operar más de una válvula/actuador desde más de un sensor.
Entrada/salida simple
Puede aceptar solo una señal del sensor y enviar solo una al actuador.
Entrada/salida múltiple (multicanal)
Puede aceptar varias señales y enviar varias señales.
Tiempo real
Puede incluir un reloj para conmutar en momentos preestablecidos, predeterminados.
Tiempo transcurrido
Puede conmutar en algún tiempo preestablecido, predeterminado antes o después de que otros elementos de la planta se hayan encendido o apagado.
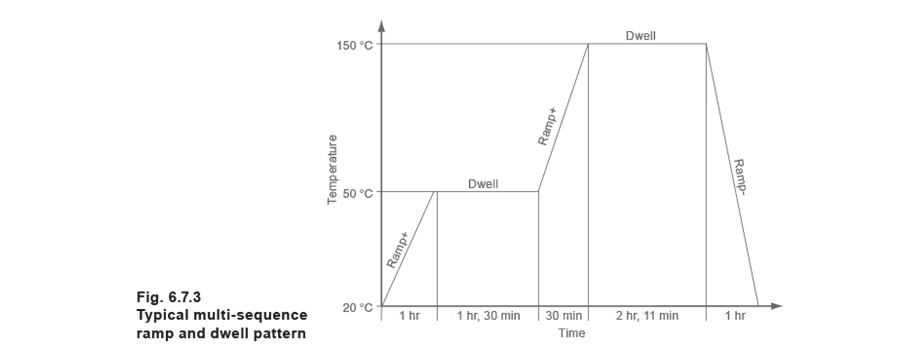
Rampa y mantenimiento
Usando la temperatura como ejemplo, la capacidad de elevar la temperatura de un medio controlado sobre un período de tiempo especificado y luego mantenerla en un valor preestablecido. Tales controladores frecuentemente incorporan una serie de rampas y mantenimientos.
La Figura 6.7.1 muestra un controlador electrónico típico de lazo simple. Este tiene acción P + I + D (discutida en los Módulos 5.2 y 5.4), adecuado para suministro de 110 o 230 voltios.
La Figura 6.7.2 muestra un controlador neumático de lazo simple con acción P.
Se pueden seleccionar diferentes modelos para controlar temperatura o presión.
Un controlador de lazo simple, que tiene la capacidad de realizar funciones de rampa y mantenimiento, puede tener un patrón de secuencia típico como el mostrado en la Figura 6.7.3. Esto muestra una serie de funciones de rampa (cambio de temperatura) y mantenimiento (mantenimiento de temperatura), realizadas durante un período de tiempo.
Un término frecuentemente encontrado en la literatura de control es ‘Controlador Lógico Programable (PLC)’. En un proceso por lotes, el controlador debe disparar una secuencia de acciones, por ejemplo, encender o apagar válvulas o bombas. En algunos casos toda la secuencia está en base a tiempo, pero a menudo los varios pasos pueden ser disparados por una condición específica que se alcanza y se mantiene durante un cierto período de tiempo; por ejemplo una cierta temperatura que se alcanza o un recipiente que se llena. Estas secuencias pueden ser controladas por un PLC, un dispositivo basado en microcomputadora que utiliza interfaces estándar para sensores y actuadores para controlar el proceso. Otro tipo de controlador complejo es el controlador de sala de máquinas, que podría usarse para controlar la caldera, la bomba, la válvula de control de calefacción, la válvula de ACS, así como proporcionar una serie de otras características.
Sensores En esta Sección se cubrirá más ampliamente el tema de la medición de temperatura. Hay una amplia variedad de sensores y transductores disponibles para medir presión, nivel, humedad y otras propiedades físicas. El sensor es la parte del sistema de control que experimenta el cambio en la variable controlada. El sensor puede ser de un tipo donde un cambio en la temperatura resulta en un cambio de voltaje o quizás un cambio de resistencia.
La señal del sensor puede ser muy pequeña, creando la necesidad de acondicionamiento local de señal y amplificación para leerla efectivamente. Un pequeño cambio en la resistencia señalado por un sensor en respuesta a un cambio de temperatura, puede, por ejemplo, ser convertido a un voltaje o corriente eléctrica para transmisión posterior al controlador.
El sistema de transmisión en sí es una fuente potencial de error.
El cableado incurre en resistencia eléctrica (medida en ohmios), así como está sujeto a interferencia eléctrica (ruido). En un sistema neumático comparable, también puede haber fugas diminutas en el sistema de tuberías.
El término ‘termostato’ generalmente se usa para describir un sensor de temperatura con conmutación de encendido/apagado.
‘Transductor’ es otro término común, y se refiere a un dispositivo que convierte una característica física en otra; por ejemplo, temperatura en voltaje (milivoltios).
Un ejemplo de transductor es un dispositivo que convierte un cambio en temperatura en un cambio de resistencia eléctrica.
Con dispositivos neumáticos, la palabra ‘transmisor’ se encuentra frecuentemente. Es simplemente otra descripción de transductor o sensor, pero generalmente con algo adicional de acondicionamiento de señal.
Sin embargo, el dispositivo de medición real generalmente se denomina sensor, y los tipos más comunes se describirán en la siguiente Sección.
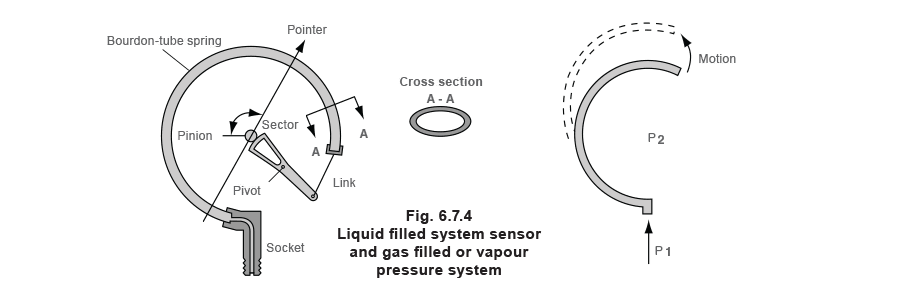
Sensores de sistema lleno
Con controladores neumáticos, se emplean sensores de sistema lleno. La Figura 6.7.4 ilustra los principios de tal sistema.
Un término frecuentemente encontrado en la literatura de control es ‘Controlador Lógico Programable (PLC)’. En un proceso por lotes, el controlador debe disparar una secuencia de acciones, por ejemplo, encender o apagar válvulas o bombas. En algunos casos toda la secuencia está en base a tiempo, pero a menudo los varios pasos pueden ser disparados por una condición específica que se alcanza y se mantiene durante un cierto período de tiempo; por ejemplo una cierta temperatura que se alcanza o un recipiente que se llena. Estas secuencias pueden ser controladas por un PLC, un dispositivo basado en microcomputadora que utiliza interfaces estándar para sensores y actuadores para controlar el proceso.
Otro tipo de controlador complejo es el controlador de sala de máquinas, que podría usarse para controlar la caldera, la bomba, la válvula de control de calefacción, la válvula de ACS, así como proporcionar una serie de otras características.
Cuando la temperatura cambia, el fluido se expande o contrae, causando que el tubo de Bourdon tienda a enderezarse. A veces se usan fuelles en lugar de un tubo de Bourdon.
En el pasado, el llenado ha sido a menudo mercurio. Cuando se calienta, se expande, causando que el tubo de Bourdon se desenrolle; el enfriamiento causa contracción y obliga al tubo de Bourdon a enrollarse más ajustadamente. Este movimiento de la espiral se usa para operar palancas dentro del controlador neumático permitiéndole realizar su tarea. Una versión de medición de presión simplemente utilizará una tubería de presión conectada al tubo de Bourdon. Nota: por razones de salud y seguridad, el mercurio ahora se usa con menos frecuencia. En su lugar, a menudo se emplea un gas inerte como el nitrógeno.
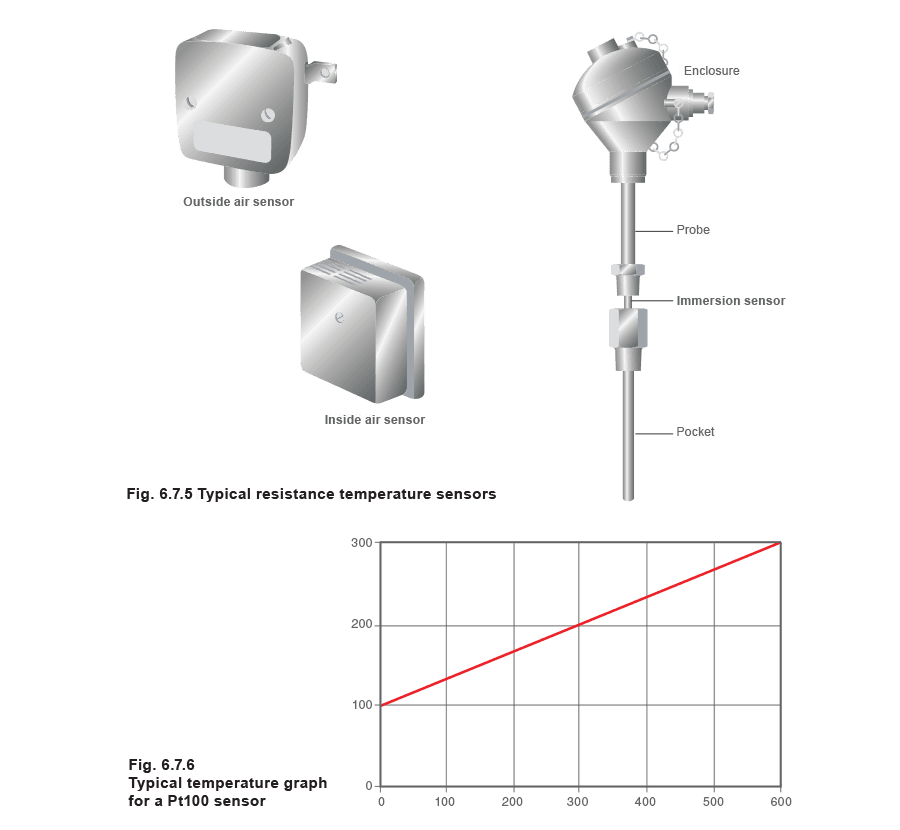
Detectores de temperatura de resistencia (RTD)
Los RTD (Figura 6.7.5) emplean el hecho de que la resistencia eléctrica de ciertos metales cambia a medida que la temperatura se altera. Actúan como transductores eléctricos, convirtiendo cambios de temperatura en cambios de resistencia eléctrica. Platino, cobre y níquel son tres metales que cumplen con los requisitos de RTD y la Figura 6.7.6 muestra la relación entre resistencia y temperatura.
Un detector de temperatura de resistencia se especifica en términos de su resistencia a 0°C y el cambio en resistencia de 0°C a 100°C. Los RTD más ampliamente usados para las aplicaciones típicas cubiertas en estos Módulos son los RTD de platino. Estos se construyen con una resistencia de 100 ohmios a 0°C y a menudo se denominan sensores Pt100. Pueden usarse en un rango de temperatura de -200°C a +800°C con alta precisión (±0.5%) entre 0°C y 100°C.
 Como se puede ver de la Figura 6.7.6, el aumento de resistencia con la temperatura es prácticamente lineal. Los Pt100 tienen un cambio relativamente pequeño en resistencia, lo que requiere una medición cuidadosa. La resistencia en los cables de conexión necesita ser correctamente compensada.
Como se puede ver de la Figura 6.7.6, el aumento de resistencia con la temperatura es prácticamente lineal. Los Pt100 tienen un cambio relativamente pequeño en resistencia, lo que requiere una medición cuidadosa. La resistencia en los cables de conexión necesita ser correctamente compensada.
Termistores
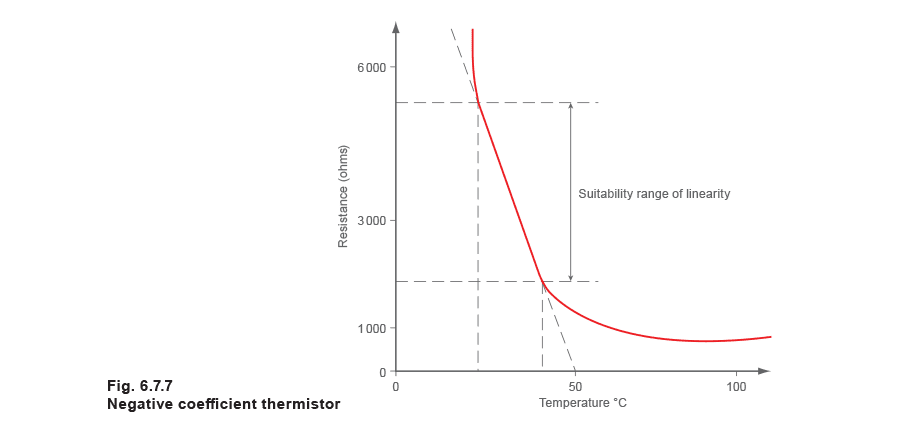
Los termistores usan materiales semiconductores, que tienen un gran cambio en resistencia con el aumento de temperatura, pero son no lineales. La resistencia disminuye en respuesta al aumento de temperatura (termistor de coeficiente negativo), como se muestra en la Figura 6.7.7.
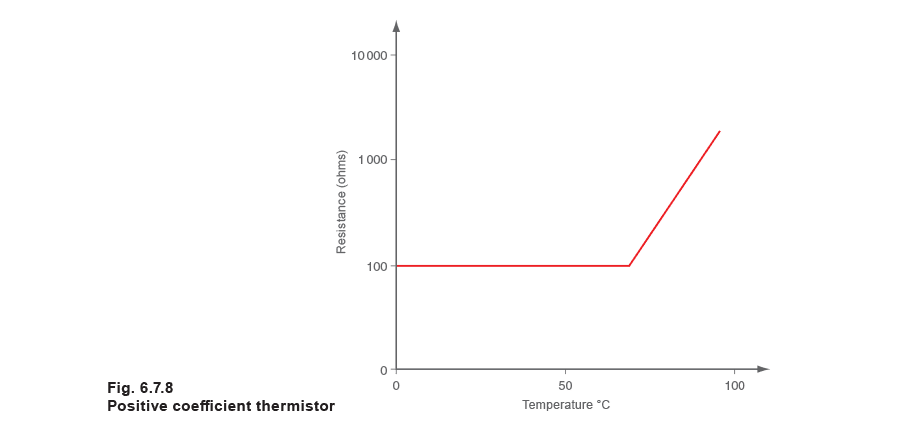
 Los termistores de coeficiente positivo pueden fabricarse donde la resistencia aumenta con el aumento de temperatura (Figura 6.7.8) pero su curva de respuesta los hace generalmente inadecuados para la detección de temperatura.
Los termistores son menos complejos y menos costosos que los RTD pero no tienen la misma alta precisión y repetibilidad. Su alta resistencia significa que la resistencia del cable de conexión es menos importante.
Los termistores de coeficiente positivo pueden fabricarse donde la resistencia aumenta con el aumento de temperatura (Figura 6.7.8) pero su curva de respuesta los hace generalmente inadecuados para la detección de temperatura.
Los termistores son menos complejos y menos costosos que los RTD pero no tienen la misma alta precisión y repetibilidad. Su alta resistencia significa que la resistencia del cable de conexión es menos importante.
Termopares
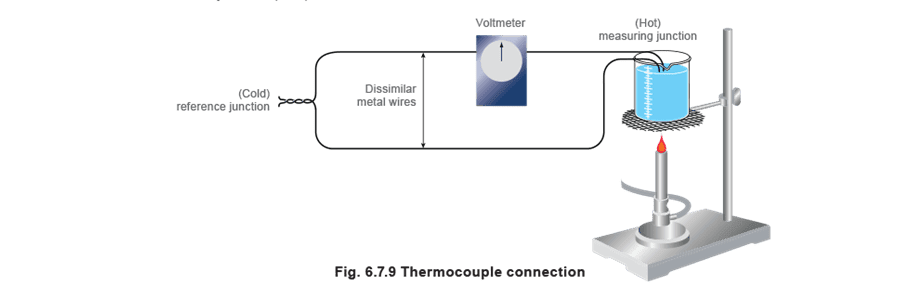
Si dos metales diferentes se unen en dos puntos y se aplica calor a una unión (como se muestra en la Figura 6.7.9), una corriente eléctrica fluirá alrededor del circuito. Los termopares producen un voltaje correspondiente a la diferencia de temperatura entre la unión de medición (caliente) y la unión de referencia (fría).
 La temperatura de la unión fría de referencia debe conocerse con precisión si el termopar mismo debe proporcionar una detección precisa.
Tradicionalmente, la unión fría se sumergía en hielo fundido (0°C), pero la temperatura de la unión fría ahora se mide por un termistor o un RTD y, a partir de esto, la temperatura indicada, generalmente en la unión de medición, se corrige. Esto se conoce como compensación de unión fría.
La temperatura de la unión fría de referencia debe conocerse con precisión si el termopar mismo debe proporcionar una detección precisa.
Tradicionalmente, la unión fría se sumergía en hielo fundido (0°C), pero la temperatura de la unión fría ahora se mide por un termistor o un RTD y, a partir de esto, la temperatura indicada, generalmente en la unión de medición, se corrige. Esto se conoce como compensación de unión fría.
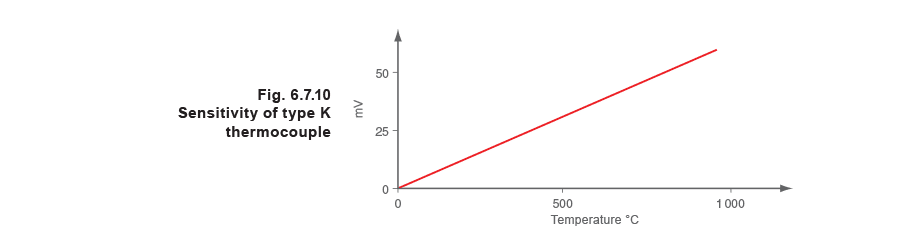
Cualquier par de metales diferentes podría usarse para hacer un termopar. Pero a lo largo de los años, han evolucionado una serie de tipos estándar que tienen una relación voltaje-temperatura documentada. Los tipos estándar se denominan mediante el uso de letras, es decir, Tipo J, K, T y otros. El termopar de propósito general más ampliamente usado es el Tipo K.
Los metales diferentes usados en este tipo son Cromo (90% níquel, 10% cromo) y Alumel (94% níquel, 3% manganeso, 2% aluminio y 1% silicio) y pueden usarse entre el rango 0°C a 1 260°C. La Figura 6.7.10 ilustra la sensibilidad de los termopares Tipo K, y se puede ver que el voltaje de salida es lineal en todo el rango.
El termopar de propósito general más ampliamente usado es el Tipo K.
Los metales diferentes usados en este tipo son Cromo (90% níquel, 10% cromo) y Alumel (94% níquel, 3% manganeso, 2% aluminio y 1% silicio) y pueden usarse entre el rango 0°C a 1 260°C. La Figura 6.7.10 ilustra la sensibilidad de los termopares Tipo K, y se puede ver que el voltaje de salida es lineal en todo el rango.
 Los cables de extensión se usan para conectar la unión de medición a la unión de referencia en la carcasa del instrumento. Estas colas de extensión pueden ser del mismo material que los cables en el termopar mismo, o pueden ser un cable compensador hecho de cobre y aleación de cobre-níquel. Ambas colas de extensión deben ser del mismo material.
Los termopares están disponibles en una amplia variedad de tamaños y formas. Son económicos y res razonablemente precisos, con amplios rangos de temperatura. Sin embargo, la temperatura de la unión de referencia debe mantenerse en un valor constante de lo contrario las desviaciones deben compensarse. Los bajos voltajes de unión significan que se debe usar cable blindado especial e instalación cuidadosa para prevenir que la interferencia eléctrica o ‘ruido’ distorsione las señales.
Los cables de extensión se usan para conectar la unión de medición a la unión de referencia en la carcasa del instrumento. Estas colas de extensión pueden ser del mismo material que los cables en el termopar mismo, o pueden ser un cable compensador hecho de cobre y aleación de cobre-níquel. Ambas colas de extensión deben ser del mismo material.
Los termopares están disponibles en una amplia variedad de tamaños y formas. Son económicos y res razonablemente precisos, con amplios rangos de temperatura. Sin embargo, la temperatura de la unión de referencia debe mantenerse en un valor constante de lo contrario las desviaciones deben compensarse. Los bajos voltajes de unión significan que se debe usar cable blindado especial e instalación cuidadosa para prevenir que la interferencia eléctrica o ‘ruido’ distorsione las señales.
Ejemplo 6.7.1 Imagine dos personas, la persona A y la persona B, cada una en laderas opuestas y cada una con una bandera y un mástil. El objetivo es que la persona A se comunique con la persona B levantando su bandera a cierta altura. La persona A levanta su bandera a la mitad de su mástil. La persona B ve esto y también levanta su bandera a la mitad. A medida que la persona A mueve su bandera arriba o abajo, la persona B hace lo mismo para igualar. Esto sería similar a un sistema analógico.
Ejemplo 6.7.2 Ahora asuma que la persona A no tiene un mástil pero en su lugar tiene dos tableros, uno con la figura ‘0’ y el otro con la figura ‘1’, y nuevamente quiere que la persona B levante su bandera a la mitad, es decir a una altura del 50% de su mástil. El número binario de 50 es 110010, así que muestra sus tableros, dos a la vez, en el orden correspondiente. La persona B lee estos tableros, los traduce para significar 50 y levanta su bandera exactamente a la mitad. Esto sería similar a un sistema digital.
Se puede ver que el sistema digital es más preciso ya que la información es un ‘1’ o un ‘0’ y la posición puede definirse con precisión. El ejemplo analógico no es tan preciso porque la persona B no puede determinar si la bandera de la persona A está exactamente al 50%. Podría estar al 49% o 51%. Es por esta razón, junto con una mayor integración de los circuitos de microprocesador, que las señales digitales se están usando más ampliamente.
Direccionamiento digital El direccionamiento digital permite a un controlador enviar información a través de un conjunto de cables en los que están conectados varios receptores y aún así poder comunicarse con solo uno de esos receptores si es necesario. Esto se hace asignando una dirección a cada receptor, que el controlador debe transmitir primero.
Para explicar esto, considere el ejemplo digital anterior pero ahora asuma que hay otra persona, la persona C en una tercera ladera. La persona B y la persona C pueden ver ambas a la persona A, por lo que la persona A debe indicar primero a quién le está hablando.
Esto se hace con el primer tablero. Si el primer tablero es un ‘0’ entonces todos los datos subsiguientes están destinados a la persona B quien ajusta su bandera en consecuencia. Inversamente, si el primer tablero es un ‘1’ entonces todos los datos subsiguientes están destinados a la persona C. Por lo tanto la persona B tiene una dirección digital de ‘0’ y la persona C tiene una dirección digital de ‘1’; cada persona sabe que el primer número que ven se refiere a la dirección no al mensaje. HART®, PROFIBUS® y Foundation™ Fieldbus.
¿Qué es PROFIBUS®? PROFIBUS® es un estándar de bus de campo abierto para una amplia gama de aplicaciones en automatización de fabricación y procesos independiente de fabricantes. La independencia de fabricantes y la transparencia están aseguradas por las normas internacionales EN 50170, EN 50254 y IEC 61158.
Permite la comunicación entre dispositivos de diferentes fabricantes sin ningún ajuste especial de interfaz. PROFIBUS® puede usarse tanto para aplicaciones de alta velocidad críticas en tiempo como para tareas de comunicación complejas. PROFIBUS® ofrece protocolos de comunicación funcionalmente graduados DP y FMS. Dependiendo de la aplicación, se pueden usar las tecnologías de transmisión RS-485, IEC 1158-2 o fibra óptica.
Define las características técnicas de un sistema de bus de campo serial con el cual controladores programables digitales distribuidos pueden conectarse en red, desde el nivel de campo hasta el nivel de celda. PROFIBUS® es un sistema multi-maestro y por lo tanto permite la operación conjunta de varios sistemas de automatización, ingeniería o visualización con su periférica distribuida en un solo bus.
A nivel de sensor/actuador, las señales de los sensores y actuadores binarios se transmiten a través de un bus de sensor/actuador. Los datos se transmiten puramente de forma cíclica.
A nivel de campo, la periférica distribuida, como módulos de E/S, transductores de medición, unidades de accionamiento, válvulas y terminales de operador se comunican con los sistemas de automatización a través de un sistema de comunicación eficiente y en tiempo real. Al igual que los datos, las alarmas, parámetros y datos de diagnóstico también pueden transmitirse cíclicamente si es necesario.
A nivel de celda, los controladores programables como PLC e IPC pueden comunicarse entre sí. El flujo de información requiere paquetes de datos grandes y un gran número de funciones de comunicación potentes, como una integración fluida en sistemas de comunicación de toda la empresa, como Intranet e Internet a través de TCP/IP y Ethernet.
¿Qué es Foundation™ Fieldbus? Foundation™ Fieldbus es un sistema de comunicaciones totalmente digital, serial y bidireccional que sirve como Red de Área Local (LAN) para instrumentación y dispositivos de control de fábrica/planta. El entorno Fieldbus® es el grupo de nivel base de las redes digitales en la jerarquía de redes de planta. Foundation™ Fieldbus se usa tanto en aplicaciones de automatización de procesos como de fabricación y tiene una capacidad incorporada para distribuir la aplicación de control a través de la red.
A diferencia de los protocolos de red propietarios, Foundation™ Fieldbus no es propiedad de ninguna empresa individual, ni está regulado por una sola nación u organismo de normas. La Foundation™ Fieldbus, una organización sin fines de lucro compuesta por más de 100 de los principales proveedores mundiales de controles e instrumentación y usuarios finales, controla la tecnología.
Mientras Foundation™ Fieldbus retiene muchas de las características deseables del sistema analógico de 4-20 mA, como una interfaz física estandarizada al cable, dispositivos alimentados por el bus en un solo cable, y opciones de seguridad intrínseca, también ofrece muchos otros beneficios.
Interoperabilidad de dispositivos Foundation™ Fieldbus ofrece interoperabilidad; un dispositivo Fieldbus® puede ser reemplazado por un dispositivo similar con funcionalidad adicional de un proveedor diferente en la misma red Fieldbus® mientras mantiene las operaciones especificadas. Esto permite a los usuarios ‘mezclar y combinar’ dispositivos de campo y sistemas anfitriones de varios proveedores. Los dispositivos Fieldbus® individuales también pueden transmitir y recibir información multivariable, y comunicarse directamente entre sí a través de un Fieldbus® común, permitiendo que se agreguen nuevos dispositivos al Fieldbus® sin interrumpir los servicios.
Datos de proceso mejorados Con Foundation™ Fieldbus, múltiples variables de cada dispositivo pueden traerse al sistema de control de la planta para analizar tendencias, optimizar procesos y generar informes. El acceso a datos precisos y de alta resolución permite ajustar los procesos para una mejor productividad, menos tiempo de inactividad y un mayor rendimiento de la planta.
Visión general del proceso Los dispositivos Fieldbus® modernos, con potentes capacidades de comunicación basadas en microprocesador, permiten que los errores del proceso se reconozcan más rápido y con mayor certeza. Como resultado, los operadores de la planta son notificados de condiciones anormales o la necesidad de mantenimiento preventivo, permitiendo al personal considerar decisiones proactivas. Las menores eficiencias operativas se corrigen más rápidamente, permitiendo que la producción aumente mientras los costos de materia prima y problemas regulatorios disminuyen.
Seguridad mejorada en la planta La tecnología Fieldbus ayuda a las plantas de fabricación a mantenerse al día con los estrictos requisitos de seguridad. Puede proporcionar a los operadores una alerta temprana de posibles condiciones peligrosas, permitiendo así que se tomen acciones correctivas para reducir las paradas no planificadas. Las capacidades de diagnóstico mejoradas de la planta también ofrecen un acceso menos frecuente a áreas peligrosas, minimizando así los riesgos para el personal.
Mantenimiento predictivo más fácil Las capacidades de diagnóstico mejoradas de los dispositivos hacen posible monitorear y rastrear condiciones insidiosas como el desgaste de válvulas y el ensuciamiento de transductores. El personal de la planta puede realizar mantenimiento predictivo sin esperar a una parada programada, reduciendo o incluso evitando el tiempo de inactividad.
Reducción de costos de cableado y mantenimiento El uso del cableado existente y conexiones multipunto proporciona ahorros significativos en los costos de instalación de red. Esto incluye reducciones en las barreras de seguridad intrínseca y costos de cableado, particularmente en áreas donde el cableado ya está in situ.
Se pueden lograr ahorros de costos adicionales a través del tiempo reducido requerido para la construcción y el arranque, así como la programación simplificada de funciones de control y lógica usando bloques de control de software incorporados en los dispositivos Fieldbus®.
Productos relacionados
Para conocer los modelos específicos de controladores y posicionadores de Spirax Sarco, consulte el controlador SX80, el posicionador SP400, el posicionador inteligente SP500, posicionador electro-neumático EP5 y el posicionador electro-neumático EP500.