Consejos prácticos de instalación y puesta en marcha para válvulas, actuadores, sensores, controladores y más.
Válvulas
Válvulas
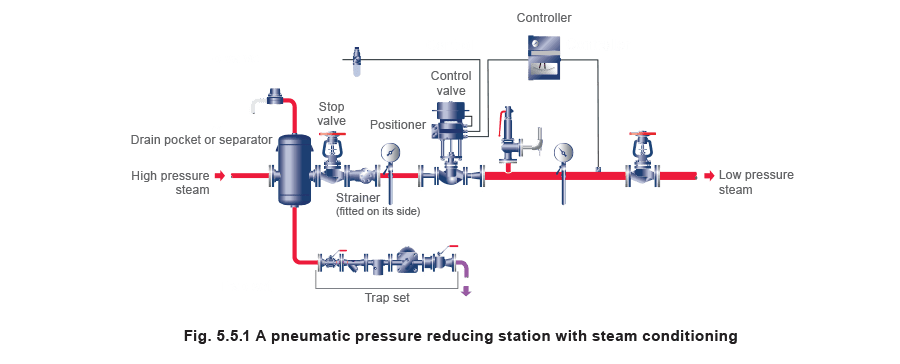
Antes de instalar una válvula de control es necesario asegurar que el tamaño, la clasificación de presión, los materiales y las conexiones finales sean todos adecuados para las condiciones bajo las cuales se espera que trabaje la válvula. Todos los fabricantes de renombre de equipos de control automáticos proporcionarán instrucciones detalladas que cubren el procedimiento correcto de instalación para su equipo. También se proporcionarán datos sobre cómo configurar el equipo, más cualquier mantenimiento rutinario y regular a realizar. En la mayoría de los casos, el fabricante también ofrecerá un servicio de puesta en marcha en sitio. En algunos casos, se puede acordar un contrato regular de mantenimiento postventa. El Módulo 5.5 cubre los principales puntos a considerar antes de la instalación. Las tuberías aguas arriba y aguas abajo de la válvula de control deben estar libres y sin obstrucciones. El funcionamiento correcto de una válvula se verá comprometido si está sujeta a esfuerzos de distorsión de línea. Es importante asegurar que todas las juntas bridadas sean cuadradas y verdaderas y que las tuberías estén adecuadamente soportadas. Las válvulas de control generalmente deben instalarse en tuberías horizontales con los vástagos verticales. Los sistemas de tuberías a menudo estarán sujetos a pruebas de presión antes de su uso. Esta prueba puede realizarse a una presión superior a las condiciones normales de trabajo. Es necesario asegurar que la válvula de control y sus componentes internos estén diseñados para soportar esta presión de prueba superior. Las válvulas de control son esencialmente instrumentos y se dañarán si se permite que la suciedad u otros materiales abrasivos u obstructivos entren en ellas. Es esencial en la mayoría de las aplicaciones prevenir esto instalando filtros de tubería aguas arriba de cualquier válvula de control. Las válvulas también deben ser accesibles para el mantenimiento rutinario, como el re-empaquetado de empaquetaduras y la sustitución de componentes internos. Para facilitar este tipo de trabajo, las válvulas de aislamiento de modelo de diámetro completo a cada lado de la válvula mantendrán el tiempo de inactividad de la planta al mínimo mientras se realizan los trabajos. Si una planta debe mantenerse en operación en todo momento, incluso cuando se está inspeccionando o manteniendo una válvula de control, puede ser necesario instalar una derivación con válvula. Sin embargo, la válvula usada en la derivación debe ser de buena calidad y debería ser una válvula de estrangulación caracterizada u otra válvula de control con el Kvs correcto. Cualquier fuga a través de ella durante la operación normal afectará la acción del sistema de control. No se recomienda que se instalen derivaciones manuales bajo ninguna circunstancia. La válvula de control debe instalarse para asegurar la dirección correcta del flujo del medio que pasa a través de la válvula. Generalmente una flecha de ‘dirección de flujo’ está fundida en el cuerpo de la válvula de control. La válvula debe tener una capacidad de flujo adecuada e incurrir en una caída de presión aceptable. En las líneas de vapor, es importante proporcionar un separador de vapor y/o un punto de drenaje aguas arriba de la válvula, como se muestra en la Figura 5.5.1. Esto prevendrá el arrastre de condensado a través de la válvula de control, lo que de otro modo reduciría su vida útil. Este punto de drenaje también es importante si la válvula de control probablemente permanezca cerrada durante cualquier período de tiempo. Si no se instala un drenaje de condensado, pueden resultar golpes de ariete y daños potencialmente graves cuando la válvula se abre. La provisión de un separador de vapor y un filtro asegura un buen acondicionamiento del vapor.
Actuadores/sensores
Actuadores/sensores
De nuevo, deben observarse las instrucciones del fabricante. Los actuadores normalmente se montan verticalmente sobre la válvula de control, aunque pueden recomendarse diferentes disposiciones si un actuador eléctrico se monta en una válvula que maneja un medio de alta temperatura, como el vapor. Generalmente, los actuadores deben ubicarse lejos de condiciones como exceso de calor, alta humedad o vapores corrosivos. Estas son propensas a causar fallos prematuros en componentes como diafragmas o elementos eléctricos/electrónicos. Los fabricantes deben indicar las condiciones ambientales máximas recomendadas para su equipo. Con algunos actuadores eléctricos, si es probable que ocurra condensación dentro del actuador, están disponibles modelos con un calentador incorporado. Donde tales condiciones no pueden evitarse, deben comprarse actuadores que sean adecuados para las condiciones instaladas. Las envolturas para actuadores, posicionadores, etc., generalmente llevarán una clasificación de envoltura conforme a un código eléctrico nacional. Esto debe especificar el grado de inmunidad de la caja a la entrada de polvo y agua. ¡Es inútil usar un actuador eléctrico cuya envoltura tiene una clasificación baja a la entrada de agua, si es probable que se limpie con manguera! Se debe tener cuidado para asegurar que los sensores estén completa y correctamente sumergidos si van a realizar su función de detección de manera efectiva. El uso de cubiertas permitirá la inspección o sustitución sin necesidad de drenar el sistema de tuberías, el recipiente o la planta de proceso. En contraste, las cubiertas retrasarán los tiempos de respuesta. El uso de pasta conductora de calor en la cubierta minimizará cualquier retraso en la respuesta.
Líneas de energía y señal
Líneas de energía y señal
Con un sistema neumático, el aire comprimido y las líneas de señal neumática deben estar secos, libres de aceite y suciedad, y herméticos. Ubicar el controlador neumático cerca de la válvula y el actuador minimizará cualquier retraso debido a la capacidad y resistencia de la línea de señal. Generalmente, la válvula, el actuador y cualquier posicionador o conversor, se suministrarán como una unidad pre-ensamblada completa. Si no lo son, el actuador necesitará montarse en la válvula, y el posicionador (para un control neumático) en el actuador. El ensamblaje entonces tendrá que configurarse correctamente, para asegurar que se logre el recorrido correcto de la válvula, etc., todo de acuerdo con las instrucciones del fabricante.
Cableado eléctrico para controles eléctricos/electrónicos y electropneumáticos
Con demasiada frecuencia, muchos problemas aparentes de ‘control’ se rastrean hasta un cableado incorrecto. Para citar un problema obvio encontrado como ejemplo extremo, ¡conectar un suministro de 110 V a un motor clasificado para 24 V resultará en daños! Se debe tener cuidado con el sistema de cableado, de acuerdo con las instrucciones del fabricante, y sujeto a cualquier regulación local. ‘El ruido’ o la interferencia eléctrica en los sistemas eléctricos se encuentran a menudo, resultando en problemas operativos que son difíciles de diagnosticar. El uso de cable blindado, conducto con toma de tierra separada o un controlador autoactivado o analógico puede ser necesario. Los cables deben protegerse contra daños mecánicos.
Controladores
Controladores
Como se mencionó anteriormente, la aplicación generalmente producirá cambios que son más lentos que el tiempo de respuesta del sistema de control. Esta es la razón por la que los parámetros del controlador, la banda proporcional o ganancia, el tiempo integral y el tiempo derivativo, deben ajustarse para adaptarse a cada aplicación/tarea específica. Hay varios métodos para ajustar los parámetros del controlador, la mayoría de los cuales involucran el uso de matemáticas. El comportamiento de un bucle de control puede predecirse matemáticamente pero las características del proceso o aplicación generalmente se determinan por medición empírica, lo que puede ser difícil. Se pueden encontrar métodos basados en relaciones de transferencia de calor de diseño, pero estos están fuera del alcance de este Módulo. Antes de ajustar los parámetros de control, es útil revisar cada uno de los términos de control (P, I y D), y las tres opciones con respecto a las configuraciones, por ejemplo, demasiado ancho, demasiado estrecho y correcto.
Banda P (Figura 5.5.2)
Banda P (Figura 5.5.2)
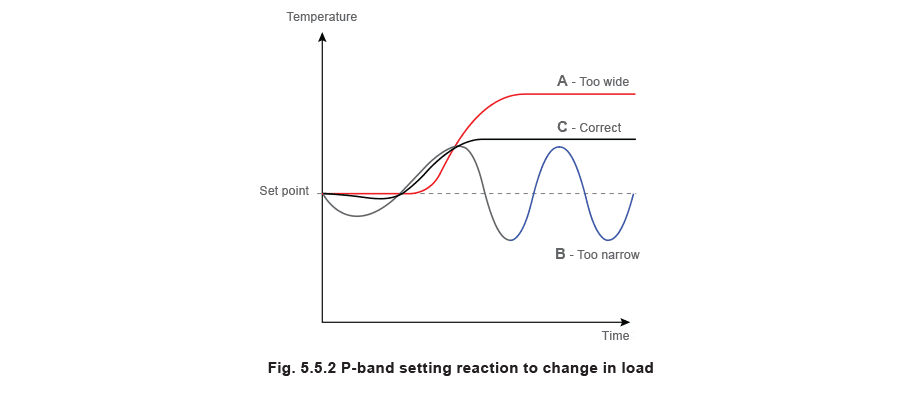
Si la banda P es demasiado ancha, ocurre un offset grande pero el sistema es muy estable (curva A). Estrechando la banda P se reducirá el offset. Una banda P demasiado estrecha causará inestabilidad y oscilación, (curva B). La banda P óptima, curva C, se logra en una configuración ligeramente más ancha que la que causa oscilación permanente.
Resumen de la banda P (acción proporcional)
Banda P correcta = Buena estabilidad, buena respuesta Algo de offset
Banda P más grande = Mejor estabilidad, respuesta más lenta Offset más grande
Banda P más pequeña = Inestabilidad, respuesta más rápida Offset más pequeño con oscilación
Acción integral (Figura 5.5.3)
Acción integral (Figura 5.5.3)
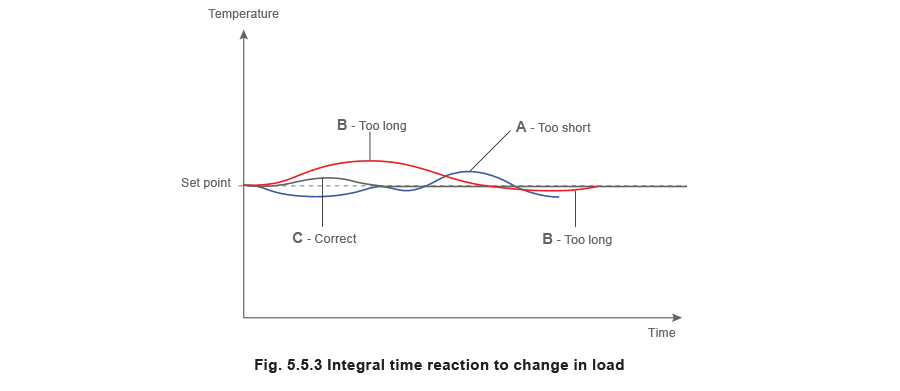
Con un tiempo integral demasiado corto, la temperatura (curva A) cruzará el punto de ajuste y ocurrirá cierta oscilación. Un tiempo integral excesivo resultará en que la temperatura tarde demasiado en volver al punto de ajuste (curva B). La curva C muestra un ajuste de tiempo integral correcto donde la temperatura vuelve al punto de ajuste lo más rápidamente posible sin ningún sobrepasamiento u oscilación.
| Resumen de la acción integral | ||
| IAT correcto = | Eliminación del offset | Estable - sin sobrepasamiento |
| IAT demasiado corto = | Eliminación del offset | Respuesta demasiado rápida, causando inestabilidad y sobrepasamiento |
| IAT demasiado largo = | Eliminación del offset | Respuesta lenta, estable, sin sobrepasamiento |
Acción derivativa (Figura 5.5.4)
Acción derivativa (Figura 5.5.4)
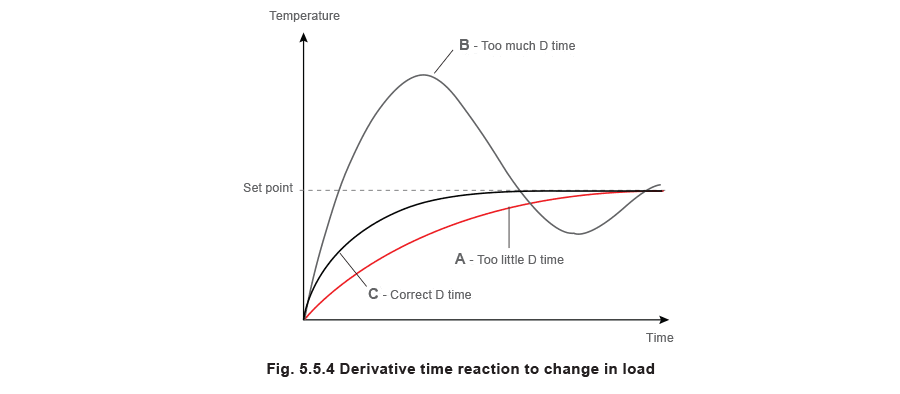
Un tiempo derivativo excesivo causará un cambio excesivamente rápido en la temperatura, sobrepasamiento y oscilación (curva B). Un tiempo derivativo demasiado corto permite que la temperatura se desvíe del punto de ajuste durante demasiado tiempo (curva A). La configuración óptima devuelve la temperatura al punto de ajuste lo más rápido posible y es consistente con una buena estabilidad (curva C).
| Resumen de la acción derivativa | |
| Tiempo derivativo correcto = | Respuesta rápida, estable |
| Demasiado tiempo D = | Respuesta más rápida que conduce a sobrepasamiento e inestabilidad |
| Muy poco tiempo D = | Respuesta más lenta |
Métodos prácticos para configurar un controlador
Métodos prácticos para configurar un controlador
Cada controlador debe configurarse individualmente para igualar las características de un sistema particular. Aunque hay varias técnicas diferentes mediante las cuales se puede lograr un control estable y rápido, el método Ziegler-Nicholls ha demostrado ser muy efectivo.
El método Ziegler-Nicholls
El método Ziegler-Nicholls
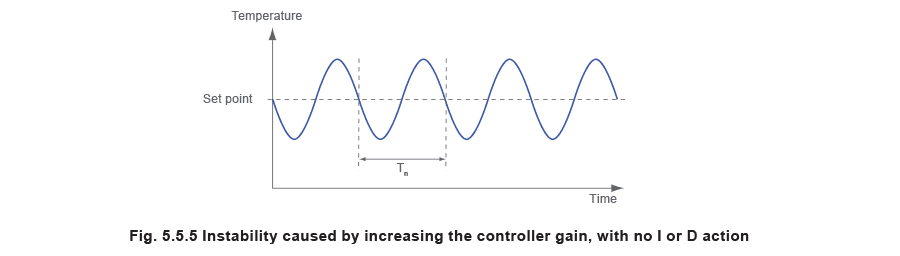
El método de respuesta de frecuencia de Ziegler-Nicholls (a veces llamado método de oscilación crítica) es muy efectivo para establecer las configuraciones del controlador para la carga real. El método usa el controlador como amplificador para alcanzar el punto de inestabilidad. En este punto todo el sistema está operando de tal manera que la temperatura fluctúa alrededor del punto de ajuste con una amplitud constante, (ver Figura 5.5.5). Un pequeño aumento en la ganancia, o una banda proporcional reducida, hará el sistema inestable, y la válvula de control comenzará a cazar con amplitud creciente. Inversamente, una banda proporcional aumentada hará el proceso más estable y la amplitud se reducirá sucesivamente. En el punto de inestabilidad, la característica del sistema se obtiene para las condiciones operativas reales, incluyendo el intercambiador de calor, la válvula de control, el actuador, las tuberías y el sensor de temperatura. Las configuraciones del controlador pueden determinarse mediante el método Ziegler-Nicholls leyendo el período de tiempo (Tn) de los ciclos de temperatura; y la configuración real de la banda proporcional en el punto de inestabilidad.
El procedimiento para seleccionar las configuraciones de los parámetros PID, usando el método Ziegler-Nicholls, es el siguiente:
- Eliminar la acción integral en el controlador aumentando el tiempo integral (Ti) a su máximo.
- Eliminar la acción derivativa del controlador estableciendo el tiempo de derivación (TD) a 0.
- Esperar hasta que el proceso alcance una condición estable.
- Reducir la banda proporcional (aumentar la ganancia) hasta que se alcance el punto de inestabilidad.
- Medir el tiempo de un período (Tn) y registrar la configuración real de la banda P (banda proporcional) en el controlador en este punto.
- Usando esta configuración como punto de partida, calcular las configuraciones apropiadas del controlador según los valores en la Figura 5.5.6.
Fig 5.5.6 Cálculo Ziegler-Nicholls
Fig 5.5.6 Cálculo Ziegler-Nicholls
| Banda proporcional | Tiempo integral | Tiempo derivativo | |
|---|---|---|---|
| Control P I D | Banda P x 1,7 | Tn/2 | Tn/8 |
| Control P I | Banda P x 2,2 | Tn/1,2 | |
| Control P | Banda P x 2,0 |
Las configuraciones del controlador pueden ajustarse más para aumentar la estabilidad o la respuesta. El impacto de cambiar la configuración de los parámetros PID en la estabilidad y la respuesta del control se muestra en la Figura 5.5.7.
Fig. 5.5.7 Efecto de cambiar las configuraciones PID
Fig. 5.5.7 Efecto de cambiar las configuraciones PID
| Estabilidad | Respuesta | |
| Aumentar banda P | Aumentada | Más lenta |
| Aumentar Ti | Aumentada | Más lenta |
| Aumentar TD | Reducida | Más rápida |
Transferencia sin sobresaltos
Transferencia sin sobresaltos
Las especificaciones técnicas de los controladores incluyen muchos otros términos y uno que se encuentra frecuentemente es la ‘transferencia sin sobresaltos’. La mayoría de los controladores incorporan un interruptor ‘Manual’ – ‘Auto’ y puede haber momentos en que ciertas situaciones de control requieran control manual. Esto hace necesaria la interrupción del bucle de control automático. Sin transferencia sin sobresaltos, la transferencia de Auto a Manual y viceversa significaría que los niveles de control se perderían, a menos que la salida manual coincidiera con la salida automática. La transferencia sin sobresaltos asegura que las salidas - ya sea de Manual a Auto o de Auto a Manual - coincidan, y solo es necesario mover el interruptor según corresponda.
Controladores de autoajuste
Controladores de autoajuste
Los microprocesadores contemporáneos proporcionan la capacidad para que algunas funciones, que previamente requerían una computadora, se empaqueten en el espacio confinado de un controlador. Entre estas, estaba la capacidad de ‘autoajuste’. Los controladores que ya no requieren que un ingeniero de puesta en marcha realice el proceso de establecer los términos P I D han estado disponibles durante muchos años. El controlador de autoajuste cambia a control encendido/apagado durante un cierto período de tiempo. Durante este período analiza los resultados de sus respuestas, y calcula y establece sus propios términos P I D. Solía ser el caso que la función de autoajuste solo podía aplicarse durante el arranque del sistema; una vez establecidos por el controlador, los términos P I D permanecían constantes, independientemente de cualquier cambio posterior en el proceso. El controlador moderno ahora puede operar lo que se denomina una función adaptativa, que no solo establece los términos P I D iniciales requeridos, sino que monitorea y re-establece estos términos si es necesario, de acuerdo con los cambios en el proceso durante las condiciones normales de funcionamiento. Tales controladores están fácilmente disponibles y son relativamente económicos. Su uso se está extendiendo cada vez más, incluso para tareas de control relativamente simples.