Una explicación de cada componente de un sistema de control, incluyendo válvulas, actuadores, sensores y controladores; junto con una introducción a los métodos de control y la dinámica del sistema, incluyendo bucles de control simples y sistemas de retroalimentación.
¿Qué son los bucles de control?
¿Qué son los bucles de control?
Este Módulo introduce la discusión sobre sistemas de control completos, formados por la válvula, el actuador, el sensor, el controlador y la dinámica del proceso mismo. Bucles de control
Un sistema de control de bucle abierto
El control de bucle abierto simplemente significa que no hay retroalimentación directa desde la condición controlada; en otras palabras, no se envía información de regreso desde el proceso o sistema bajo control para informar al controlador que se requiere una acción correctora. El sistema de calefacción mostrado en la Figura 5.3.1 demuestra esto usando un sensor fuera de la habitación que se está calentando. El sistema mostrado en la Figura 5.3.1 no es un ejemplo de un sistema práctico de control de calefacción; simplemente se está usando para representar el principio de control de bucle abierto.
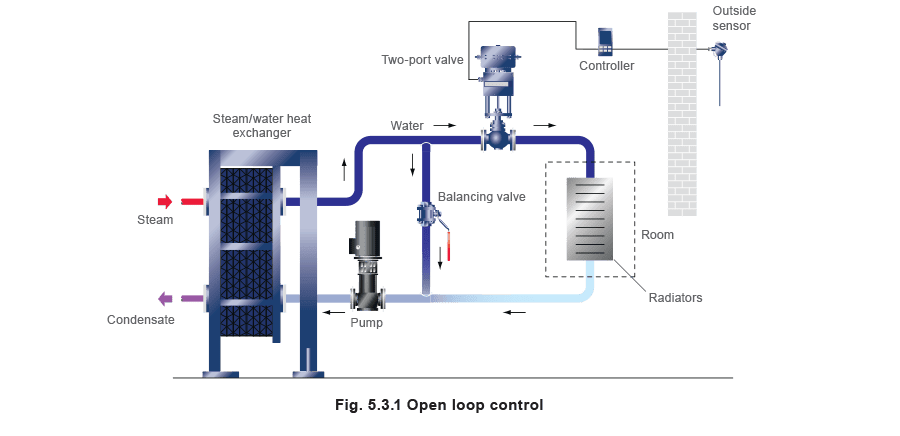
El sistema consiste en un controlador proporcional con un sensor exterior que detecta la temperatura del aire ambiente. El controlador podría ajustarse con una banda proporcional bastante grande, de modo que a una temperatura ambiente de -1 °C la válvula está completamente abierta, y a una temperatura ambiente de 19 °C la válvula está completamente cerrada. Como la temperatura ambiente tendrá un efecto en la pérdida de calor del edificio, se espera que la temperatura de la habitación se controle.
Sin embargo, no hay retroalimentación sobre la temperatura de la habitación y el calentamiento debido a otros factores. En clima suave, aunque el flujo de agua se está controlando, otros factores, como una ganancia solar alta, podrían causar que la habitación se sobrecaliente. En otras palabras, el control abierto tiende solo a proporcionar un control grosero de la aplicación. La Figura 5.3.2 representa un sistema de control ligeramente más sofisticado con dos sensores.
Control de bucle cerrado
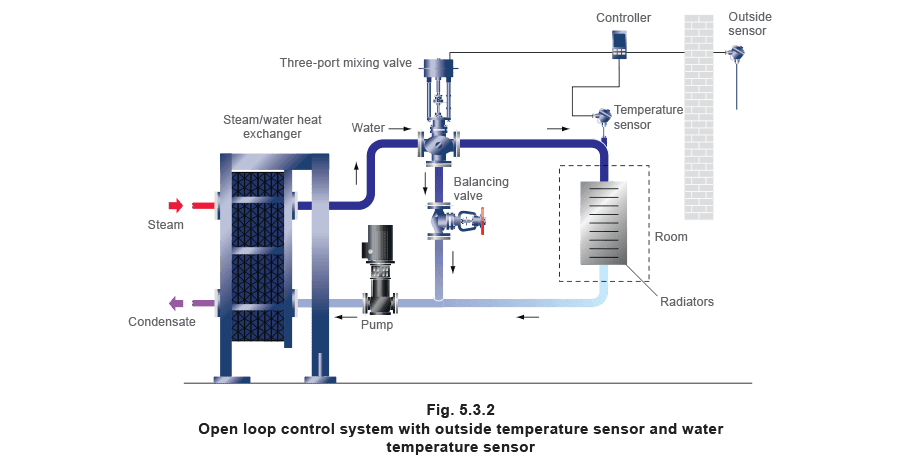
El sistema usa una válvula de mezcla de tres puertos con un actuador, controlador y sensor de aire exterior, más un sensor de temperatura en la línea de agua.
El sensor de temperatura exterior proporciona una entrada de punto de ajuste remoto al controlador, que se usa para compensar el punto de ajuste de temperatura del agua. De esta manera, el control de bucle cerrado se aplica a la temperatura del agua que fluye a través de los radiadores. Cuando hace frío afuera, el agua fluye a través del radiador a su temperatura máxima. A medida que la temperatura exterior sube, el controlador automáticamente reduce la temperatura del agua que fluye a través de los radiadores. Sin embargo, esto sigue siendo control de bucle abierto en lo que respecta a la temperatura de la habitación, ya que no hay retroalimentación desde el edificio o espacio que se está calentando. Si los radiadores están sobredimensionados o se han cometido errores de diseño, el sobrecalentamiento aún ocurrirá.
Control de bucle cerrado
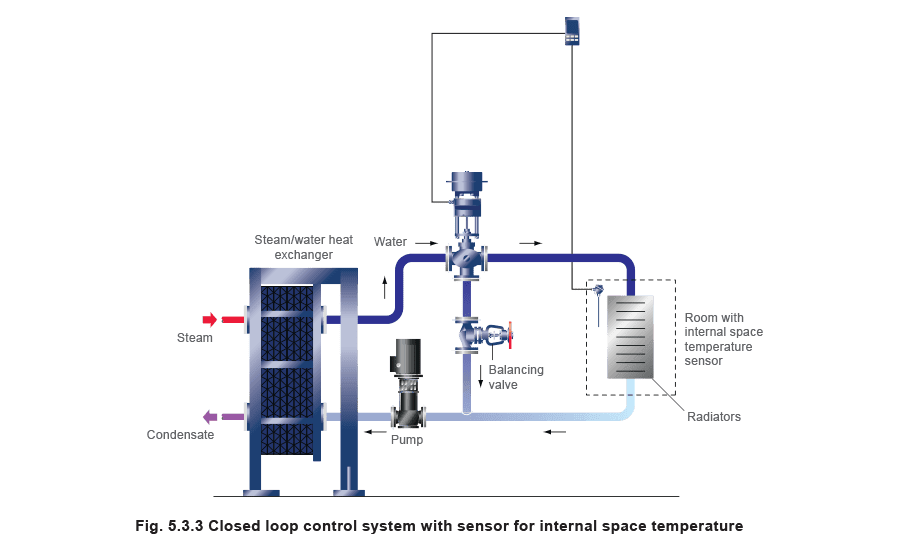
De manera muy simple, un control de bucle cerrado requiere retroalimentación; información enviada directamente desde el proceso o sistema. Usando el simple sistema de calefacción mostrado en la Figura 5.3.3, la adición de un sensor de temperatura del espacio interno detectará la temperatura de la habitación y proporcionará control de bucle cerrado con respecto a la habitación. En la Figura 5.3.3, la válvula y el actuador se controlan a través de un sensor de temperatura del espacio en la habitación, proporcionando retroalimentación de la temperatura real de la habitación.
Perturbaciones
Perturbaciones
Las perturbaciones son factores que entran en el proceso o sistema para alterar el valor del medio controlado. Estas perturbaciones pueden ser causadas por cambios en la carga o por influencias externas. Por ejemplo; si en un sistema de calefacción simple, una habitación se llenara repentinamente de personas, esto constituiría una perturbación, ya que afectaría la temperatura de la habitación y la cantidad de calor requerida para mantener la temperatura del espacio deseada.
Control de retroalimentación
Control de retroalimentación
Este es otro tipo de control de bucle cerrado. El control de retroalimentación tiene en cuenta las perturbaciones y alimenta esta información de vuelta al controlador, para permitir que se tome una acción correctora. Por ejemplo, si un gran número de personas entran en una habitación, la temperatura del espacio aumentará, lo que causará que el sistema de control reduzca la entrada de calor a la habitación.
Control anticipativo
Control anticipativo
Con el control anticipativo, los efectos de cualquier perturbación se anticipan y se contabilizan antes de que el evento realmente ocurra. Un ejemplo de esto es llevar la caldera a fuego alto antes de poner en línea una planta de proceso de alto consumo de vapor. La secuencia de eventos podría ser que la planta de proceso se enciende. Esta acción, en lugar de abrir la válvula de vapor al proceso, instruye al quemador de la caldera a fuego alto. Solo cuando se alcanza la posición de fuego alto se permite que la válvula de vapor del proceso se abra, y luego de manera lenta y controlada.
Control de bucle simple
Control de bucle simple
Este es el bucle de control más simple que involucra solo una variable controlada, por ejemplo, temperatura. Para explicar esto, se considera un intercambiador de calor de vapor a agua como se muestra en la Figura 5.3.4.
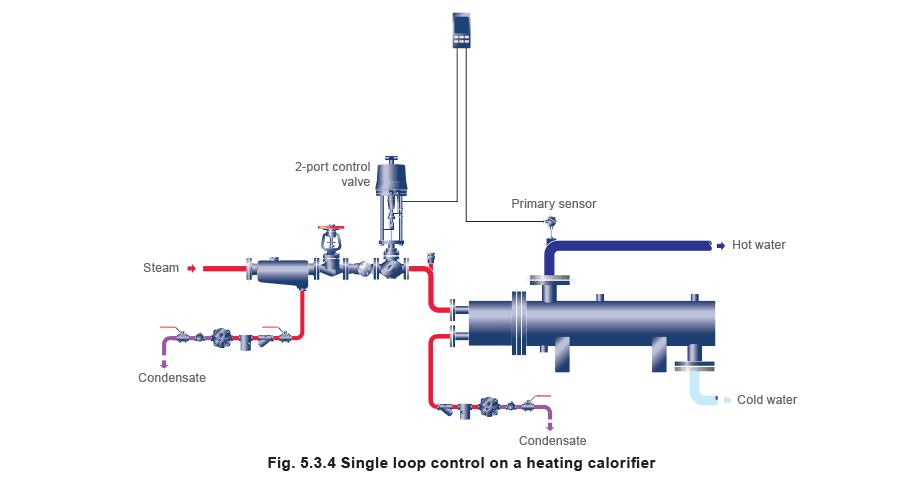
La única variable controlada en la Figura 5.3.4 es la temperatura del agua que sale del intercambiador de calor. Esto se logra controlando la válvula de vapor de 2 puertos que suministra vapor al intercambiador de calor. El sensor primario puede ser un termopar o termómetro de resistencia de platino PT100 que detecta la temperatura del agua.
El controlador compara la señal del sensor con el punto de ajuste en el controlador. Si hay una diferencia, el controlador envía una señal al actuador de la válvula, que a su vez mueve la válvula a una nueva posición. El controlador también puede incluir un indicador de salida, que muestra el porcentaje de apertura de la válvula. Los bucles de control simple proporcionan la gran mayoría del control para sistemas de calefacción y procesos industriales. Otros términos usados para bucles de control simple incluyen:
- Control de valor de ajuste
- Control de bucle cerrado simple.
- Control de retroalimentación.
Control de múltiples bucles
Control de múltiples bucles
El siguiente ejemplo considera una aplicación para un producto a base de madera de movimiento lento, que debe controlarse a un nivel de humedad específico (ver Figuras 5.3.5 y 5.3.6).
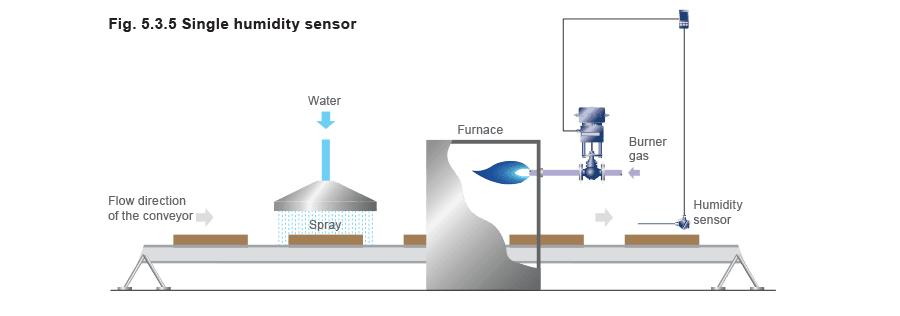
En la Figura 5.3.5, el único sensor de humedad al final de la cinta transportadora controla la cantidad de calor añadido por el horno. Pero si la tasa de pulverización de agua cambia debido, por ejemplo, a fluctuaciones en la presión del suministro de agua, puede pasar quizás 10 minutos antes de que el producto llegue al extremo lejano de la cinta transportadora y el sensor de humedad reaccione. Esto causará variaciones en la calidad del producto.
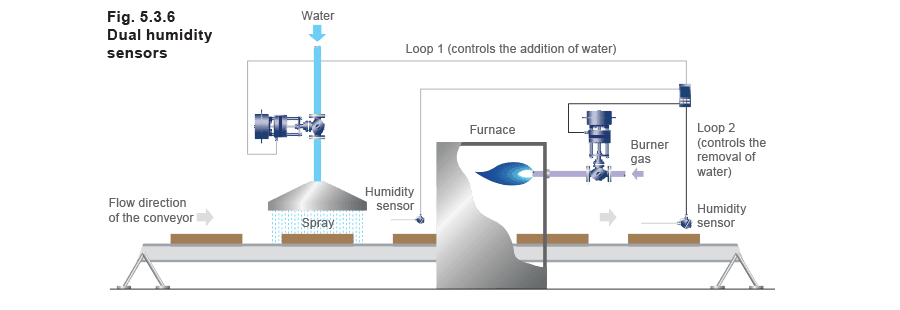
Para mejorar el control, se puede instalar un segundo sensor de humedad en otro bucle de control inmediatamente después de la pulverización de agua, como se muestra en la Figura 5.3.6. Este sensor de humedad proporciona una entrada de punto de ajuste remoto al controlador que se usa para compensar el punto de ajuste local. El punto de ajuste local se fija en la humedad requerida después del horno. Esto, en una forma simple, ilustra el control de múltiples bucles. Este sistema de control de humedad consiste en dos bucles de control:
- El bucle 1 controla la adición de agua.
- El bucle 2 controla la eliminación de agua. Dentro de este proceso, los factores influenciarán ambos bucles. Algunos factores como la presión del agua afectarán ambos bucles. El bucle 1 intentará corregir esto, pero cualquier error resultante tendrá un impacto en el bucle 2.
Control en cascada
Control en cascada
Donde dos variables independientes necesitan controlarse con una válvula, puede usarse un sistema de control en cascada. La Figura 5.3.7 muestra un recipiente con camisa de vapor lleno de producto líquido. Los aspectos esenciales del proceso son bastante rigurosos:
- El producto en el recipiente debe calentarse a cierta temperatura.
- El vapor no debe exceder cierta temperatura o el producto puede echarse a perder.
- La temperatura del producto no debe aumentar más rápido que cierta tasa o el producto puede echarse a perder. Si se usara un control normal de bucle simple con el sensor en el líquido, al inicio del proceso el sensor detectaría una temperatura baja, y el controlador señalaría a la válvula que se mueva a la posición completamente abierta. Esto resultaría en un problema causado por una temperatura de vapor excesiva en la camisa.
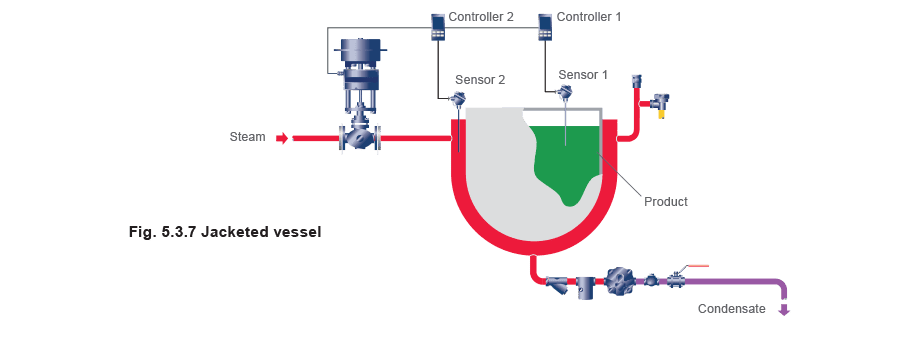
La solución es usar un control en cascada usando dos controladores y dos sensores:
- Un controlador esclavo (Controlador 2) y sensor que monitorean la temperatura del vapor en la camisa, y emiten una señal a la válvula de control.
- Un controlador maestro (Controlador 1) y sensor que monitorean la temperatura del producto con la salida del controlador dirigida al controlador esclavo.
- La señal de salida del controlador maestro se usa para variar el punto de ajuste en el controlador esclavo, asegurando que la temperatura del vapor no se exceda. Ejemplo 5.3.1 Un ejemplo de control en cascada aplicado a un recipiente de proceso La temperatura del líquido debe calentarse de 15 °C a 80 °C y mantenerse a 80 °C durante dos horas. La temperatura del vapor no puede exceder 120 °C bajo ninguna circunstancia. La temperatura del producto no debe aumentar más rápido que 1 °C/minuto. El controlador maestro puede programarse gradualmente para que la tasa de aumento en la temperatura del agua no sea mayor que la especificada. El controlador maestro se configura en modo de acción inversa, de modo que su señal de salida al controlador esclavo es 20 mA a baja temperatura y 4 mA a alta temperatura. El punto de ajuste remoto en el controlador esclavo se fija de modo que su señal de salida a la válvula es 4 mA cuando la temperatura del vapor es 80 °C, y 20 mA cuando la temperatura del vapor es 120 °C. De esta manera, la temperatura del vapor no puede ser más alta que la tolerada por el sistema, y la presión del vapor en la camisa no puede ser mayor que la presión de saturación de 1 bar g a 120 °C.
Dinámicas del proceso
Dinámicas del proceso
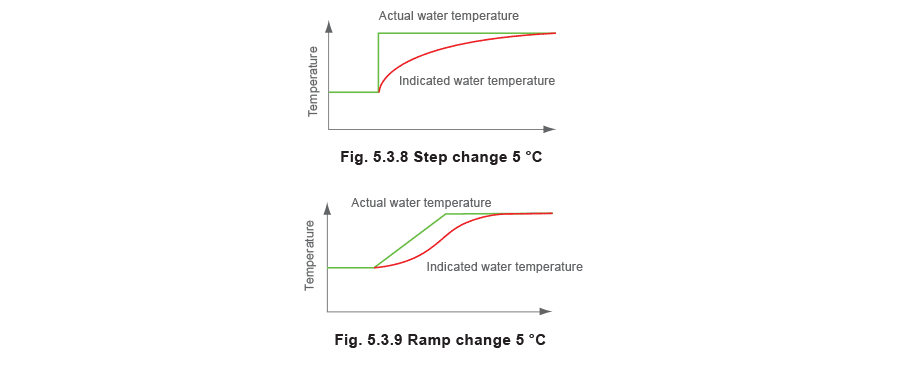
Este es un tema muy complejo pero esta parte del texto cubrirá las consideraciones más básicas. El término ‘constante de tiempo’, que trata la definición del tiempo tomado para el movimiento del actuador, ya se ha descrito en el Módulo 5.1; pero para reiterar, es el tiempo que tarda un sistema de control en alcanzar aproximadamente dos tercios de su movimiento total como resultado de un cambio escalón dado en temperatura, u otra variable. Otras partes del sistema de control tendrán respuestas basadas en tiempo similares: el controlador y sus componentes y el sensor mismo. Todos los instrumentos tienen un retardo de tiempo entre la entrada al instrumento y su salida posterior. Incluso el sistema de transmisión tendrá un retardo de tiempo: no es un problema con sistemas eléctricos/electrónicos pero un factor que puede necesitarse tener en cuenta con sistemas de transmisión neumáticos. Las Figuras 5.3.8 y 5.3.9 muestran algunos retardos de respuesta típicos para un termopar que ha sido instalado en una cubierta para detectar la temperatura del agua.
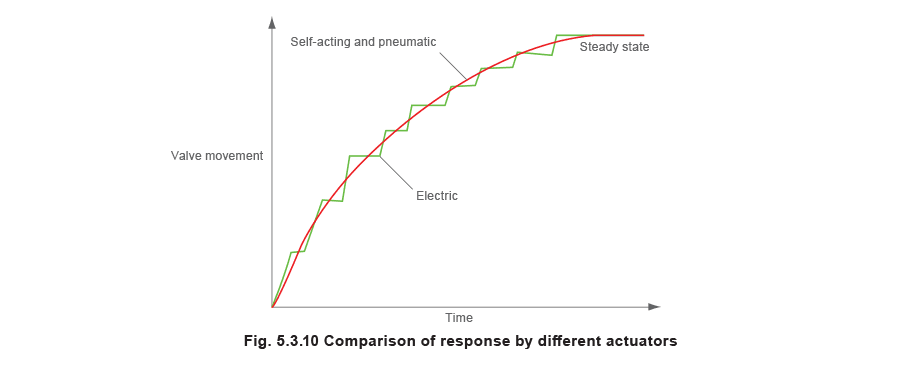
Aparte de los retrasos en la respuesta del sensor, otras partes del sistema de control también afectan el tiempo de respuesta. Con sistemas neumáticos y autoactivados, el movimiento de la válvula/actuador tiende a ser suave y, en un controlador proporcional, directamente proporcional a la desviación de temperatura en el sensor.
Con un actuador eléctrico hay un retraso debido al tiempo que tarda el motor en mover el mecanismo de control. Debido a que la señal de control es una serie de pulsos, el motor proporciona ráfagas de movimiento seguidas de períodos donde el actuador está estacionario. El diagrama de respuesta (Figura 5.3.10) representa esto. Sin embargo, debido a los retrasos en la respuesta del proceso, la temperatura controlada final puede seguir siendo suave.
Los sistemas de control cubiertos en este Módulo solo han considerado condiciones de estado estacionario. Sin embargo, el proceso o planta bajo control puede estar sujeto a variaciones siguiendo un cierto patrón de comportamiento. Se requiere que el sistema de control haga que el proceso se comporte de manera predecible. Si el proceso es uno que cambia rápidamente, entonces el sistema de control debe ser capaz de reaccionar rápidamente.
Si el proceso experimenta un cambio lento, las demandas sobre la velocidad de operación del sistema de control no son tan estrictas. Se ha documentado mucho sobre el comportamiento estático y dinámico de controladores y sistemas de control: sensibilidad, tiempo de respuesta, etc. Posiblemente el factor más importante de consideración es el retardo de tiempo del bucle de control completo. Las dinámicas del proceso necesitan consideración para seleccionar el tipo correcto de controlador, sensor y actuador.
Reacciones del proceso
Reacciones del proceso
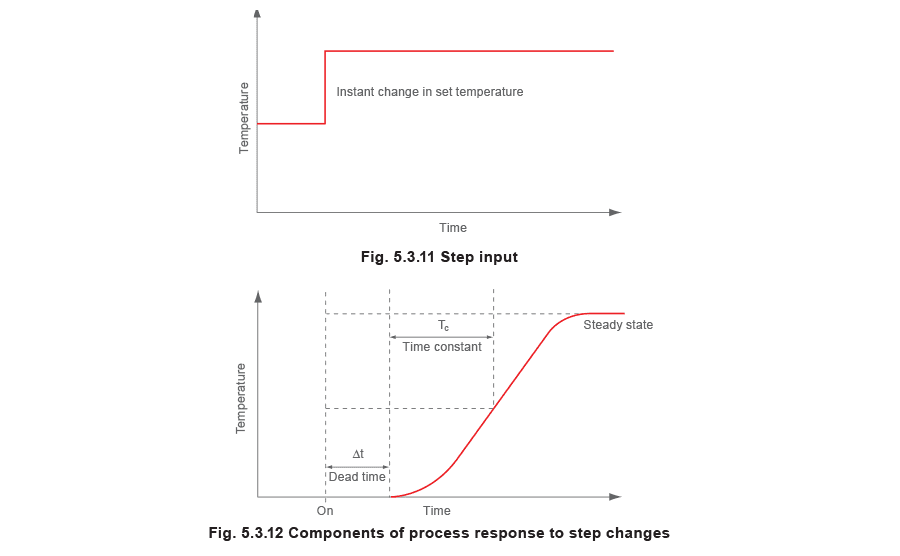
Estas características dinámicas se definen por la reacción del proceso a un cambio repentino en las configuraciones de control, conocido como una entrada escalón. Esto podría incluir un cambio inmediato en la temperatura de ajuste, como se muestra en la Figura 5.3.11. La respuesta del sistema se representa en la Figura 5.3.12, que muestra cierta cantidad de tiempo muerto antes de que la temperatura del proceso comience a aumentar. Este tiempo muerto se debe al retardo de control causado por cosas como un actuador eléctrico moviéndose a su nueva posición. La constante de tiempo diferirá según la respuesta dinámica del sistema, afectada por cosas como si el sensor está alojado en una cubierta o no.
La respuesta de cualquier dos procesos puede tener diferentes características debido al sistema.
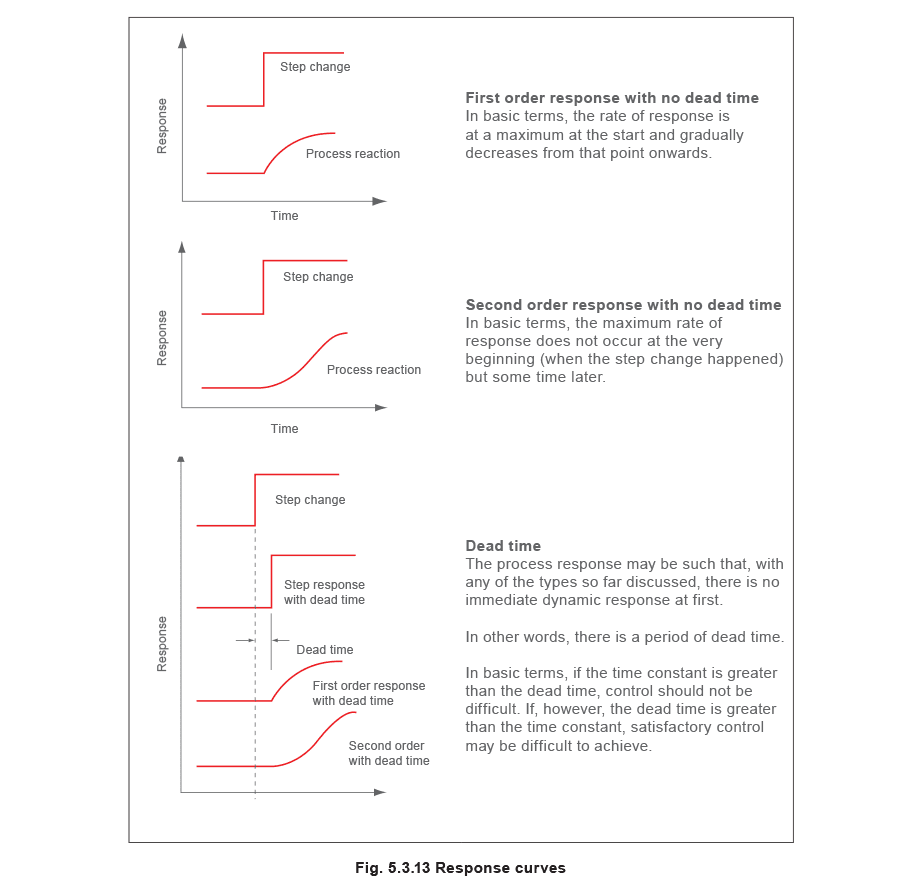
Los efectos del tiempo muerto y la constante de tiempo en la respuesta del sistema a un cambio repentino de entrada se muestran gráficamente en la Figura 5.3.12. Los sistemas que tienen una tasa de respuesta inicial rápida a cambios de entrada se denominan generalmente como que poseen una respuesta de primer orden. Los sistemas que tienen una tasa de respuesta inicial lenta a cambios de entrada se denominan generalmente como que poseen una respuesta de segundo orden. Una visión general de los tipos básicos de respuesta del proceso (efectos del tiempo muerto, respuesta de primer orden, y respuesta de segundo orden) se muestra en la Figura 5.3.13.