Computadoras en controles
Un vistazo a los desarrollos más recientes en control que involucran el uso de tecnología de la información.
Puede ser apropiado terminar el Bloque 5 con una mirada amplia a la participación de las computadoras en los sistemas de control.
Una definición de diccionario del término ‘computadora’ es ‘un dispositivo electrónico programable que puede almacenar, recuperar y procesar datos’. Esta definición incluye los controladores básicos, de bucle simple y múltiples bucles comúnmente encontrados en industrias de proceso donde una condición es leída por un sensor, comparada con un punto de ajuste en el controlador a través de algunas rutinas matemáticas realizadas para determinar la acción correctora requerida, seguida de una salida de una señal apropiada. La tasa de desarrollo del chip de computadora y su impacto en todos los aspectos de la vida es bien conocida. La tasa de avance en la tecnología de controles seguramente significa que algunos de los siguientes comentarios serán redundantes cuando se lean. Historia Los controladores de bucle simple autónomos se remontan a los controladores neumáticos, que, a través del uso ingenioso de aletas y boquillas, podían aproximar las funciones PID básicas. Estos controladores complejos y costosos a menudo se encontraban en grandes plantas petroquímicas donde el control preciso del proceso, así como la seguridad intrínseca (la ausencia de chispas que podrían iniciar un incendio) era esencial.
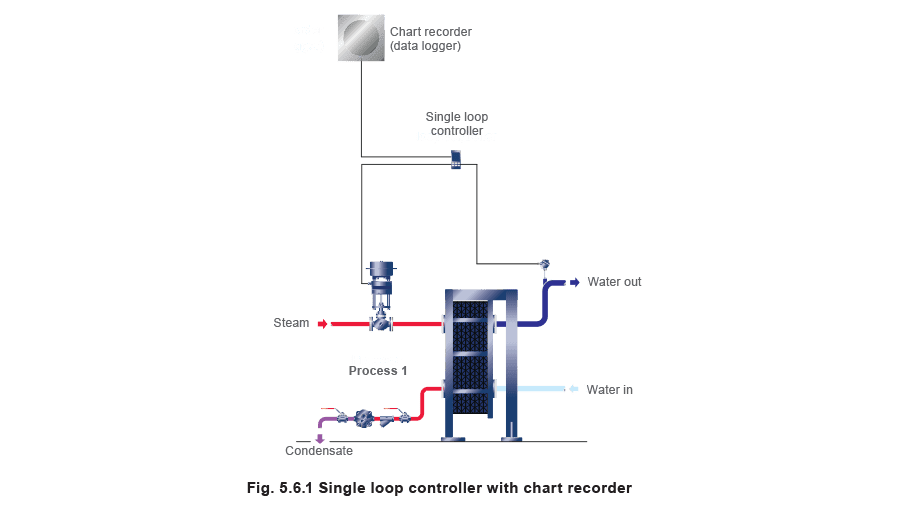
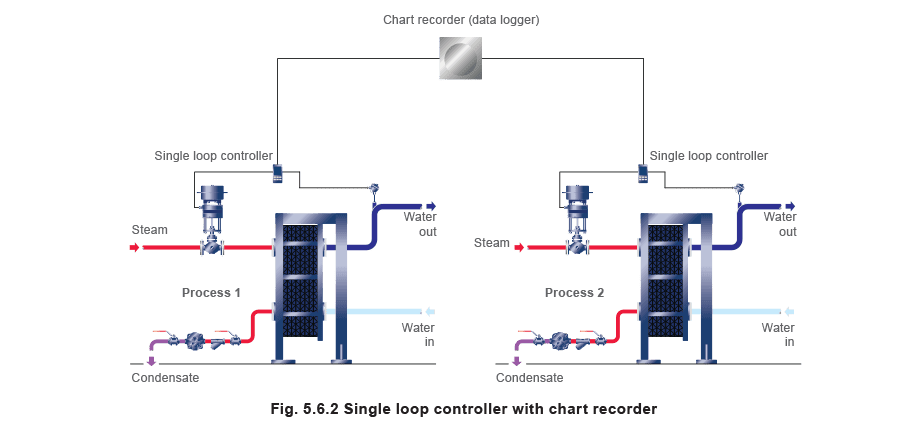
A menudo, estos procesos se conectaban individualmente a registradores de gráfico circular locales (Figura 5.6.1); alternativamente, varios procesos se conectaban a registradores de múltiples plumas en salas de control (Figura 5.6.2). Mientras que los registradores de múltiples plumas permitían que varios parámetros se revisaran juntos, los mecanismos en el instrumento y el número de líneas en un gráfico efectivamente limitaban su uso a aproximadamente doce entradas.
Las primeras computadoras usadas en sistemas de control reemplazaron los registradores de gráfico de la sala de control principal. Recopilaron información (o datos) de un número mucho mayor de puntos alrededor de la planta. Se les denominaba generalmente como ‘registradores de datos’ (Figura 5.6.3), y no tenían entrada a la operación de la planta.
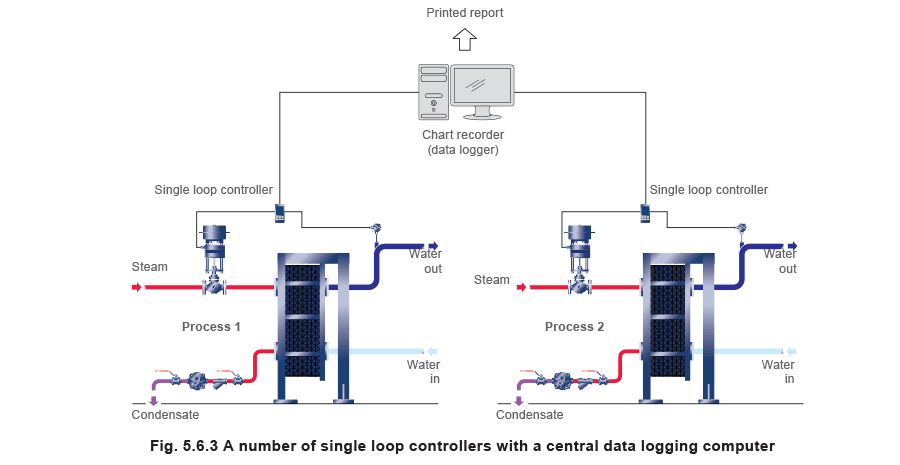
Estas primeras computadoras generalmente se programaban para imprimir informes a intervalos de tiempo específicos en papel continuo de listado de computadora. Extrayendo manualmente los datos de las impresiones de computadora, el gerente de planta era capaz de revisar la operación de su planta en su conjunto, comparando el rendimiento de diferentes partes de la planta, buscando deterioro en el rendimiento, que indicaría la necesidad de una parada, etc.
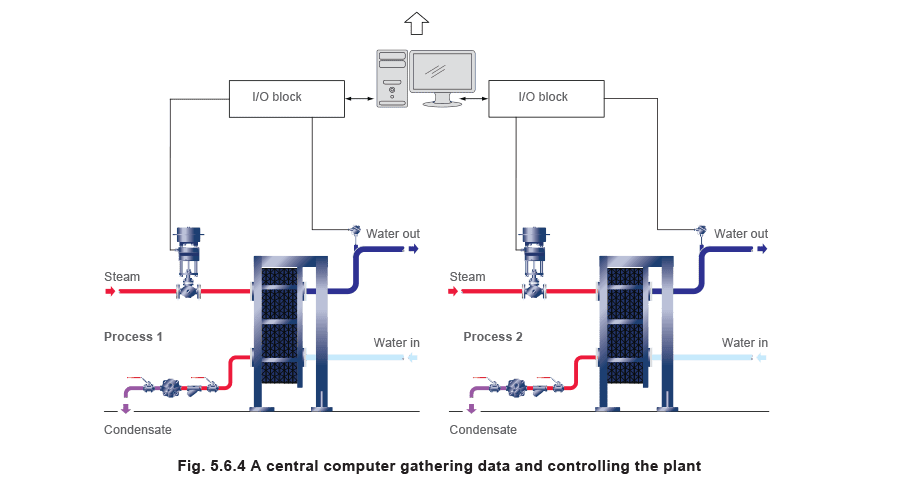
A mediados de los años 70, varias empresas de instrumentos conocidas comenzaron a comercializar sistemas de control digital. Estos sistemas utilizaban una unidad central de computadora, que tomaba entradas de sensores, realizaba rutinas matemáticas, y proporcionaba una salida a varios dispositivos de control relevantes. También mantuvieron un registro de eventos para revisión (ver Figura 5.6.4).
Notas importantes:
- Una computadora personal (PC) no puede aceptar las señales de instrumentos crudos (4 - 20 mA, 0 - 10 V) de un dispositivo de control. Se requería un dispositivo de Entrada / Salida (I / O) para ‘traducir’ entre ambos. Cada uno de los fabricantes de I / O tenía una forma única de lograr esto, lo que significaba que los sistemas no eran tan compatibles como se pretendía.
- Al principio, los dispositivos de I / O estaban en la sala de control principal de la planta, y cada pieza individual de equipo estaba conectada a la sala de control principal por su propio cable de señal individual. Esto significaba que en una planta grande, la instalación y gestión del cableado era un tema importante, en términos de su volumen físico y costo correspondiente.
- A medida que la tecnología avanzó, el dispositivo de I / O se movió a la planta, y la cantidad de cableado a la sala de control se redujo, pero seguía siendo significativa. Estos Sistemas de Control Digital llevaron al desarrollo de:
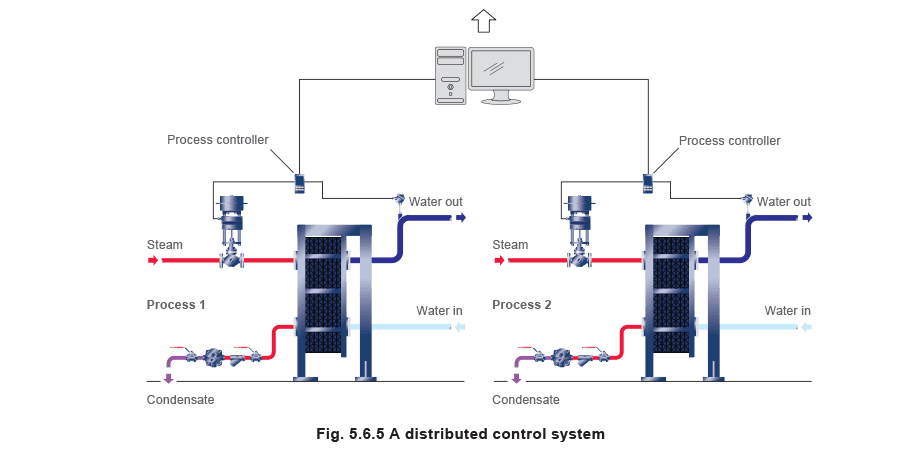
- Sistemas de Control Distribuido (DCS)
- Sistemas de Supervisión, Control y Adquisición de Datos (SCADA), y
- Sistemas de Gestión de Edificios (BMS) … todos los cuales están en uso prolífico hoy (ver Figura 5.6.5).
Un salto gigante hacia adelante ocurrió a finales de los años 80 con la introducción del PC y el entorno de pantalla Windows y sistema operativo de computadora. Esto proporcionó una plataforma estándar para los anteriores sistemas de control digital, ya que todas las empresas de instrumentos necesitaban trabajar en un formato común. La ventaja de los sistemas basados en ‘Windows’ era que la información era intercambiable de la misma manera que el usuario de computadora personal de hoy puede libremente intercambiar datos entre Word, ‘Excel’ y ‘PowerPoint’. Este ‘lenguaje’ de intercambio de datos se denominó Intercambio Dinámico de Datos (DDE), y posteriormente se desarrolló en Vinculación e Incrustación de Objetos (OLE). Esto fue modificado posteriormente para control de procesos para convertirse en OLE para Control de Procesos (OPC), que todavía se usa en el momento de escribir.
El uso de PCs también significó que las opciones para ver el historial eran considerablemente más fáciles. En lugar de estar confinado a impresiones y transferencia manual de datos, el gerente de planta podía usar potentes programas de gráficos, analizar tendencias, agregar colores, ajustar escalas y usar símbolos; diferentes variables podían graficarse entre sí, y comparar el rendimiento de diferentes plantas.
Los sistemas de automatización modernos utilizan la computadora como una ‘Ventana’ al proceso. El operador usa la computadora para monitorear lo que está sucediendo en la planta en su conjunto, y revisar puntos de ajuste y parámetros de control, como PID, de controladores de planta individuales, dejando así a los controladores individuales ejecutar los algoritmos PID y la lógica de control.
Consecuentemente los controladores autónomos todavía tienen un lugar en los sistemas de automatización modernos ya que están en el control final, pero el controlador generalmente toma la forma de un PLC (Controlador Lógico Programable) o un dispositivo montado en bastidor de múltiples bucles. Estos son bastante diferentes en apariencia a los controladores PID de bucle simple. En lugar de que un operador use un teclado numérico para cambiar el punto de ajuste y otros parámetros de control en el controlador, se cambian por un operador en una computadora, que descarga electrónicamente el parámetro requerido al controlador. En caso de un fallo de la computadora central, el controlador autónomo continuaría con sus parámetros actuales o iría a una condición segura, asegurando así que la planta siguiera operando de manera segura.
El siguiente gran paso adelante fue un sistema conocido como ‘Fieldbus’.
Fieldbus usa un sistema de cable digital único, que conecta cada elemento (ver Figura 5.6.6).
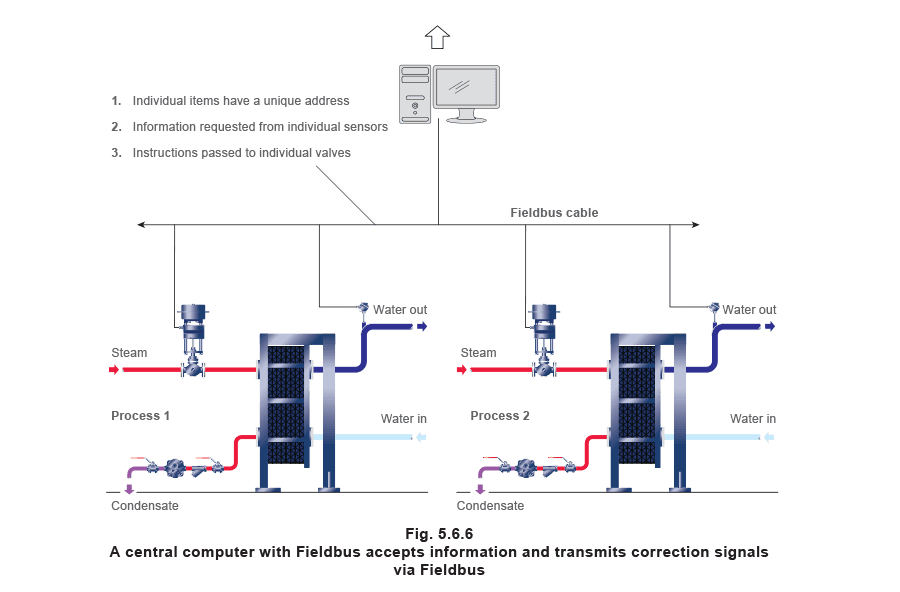
Cada elemento (sensor, controlador y dispositivo controlado) recibe una dirección única, que se usa para solicitar información (quizás de un sensor) o para tomar alguna acción (quizás cerrar una válvula de control).
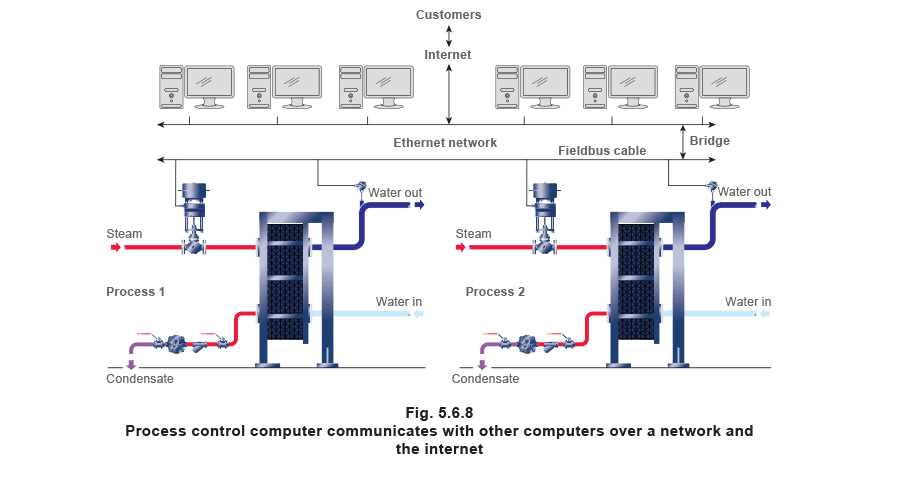
Sin embargo, estos sistemas son complejos y pueden ser costosos. Una red Fieldbus necesita un controlador maestro para organizar las comunicaciones y la lógica de control en el Fieldbus. También necesita una forma de interconectar el Fieldbus con redes de computadoras para que la información pueda compartirse (ver Figura 5.6.8). Un dispositivo que combina el rol de controlador Fieldbus y proporciona el puente a una red PC se llama ‘puente’ o ‘controlador maestro’, (ver Figura 5.6.7).

En el lado del proceso el puente puede:
- Solicitar y recibir datos de varios sensores.
- Usar esta información en rutinas matemáticas complejas para determinar y transmitir la acción correctora requerida a dispositivos de control como válvulas.
- Puede solicitar al equipo que inicie una rutina de diagnóstico, e informe. En el lado de la red de computadoras puede proporcionar:
- Datos históricos del equipo, como fecha y resultado de rutinas de diagnóstico recientes.
- Alarmas cuando el proceso o equipo excede los parámetros establecidos.
- Datos detallados históricos y actuales sobre el rendimiento de la planta.
Notas importantes:
- Los puentes varían en complejidad pero pueden controlar 50+ procesos; equivalente a 50 controladores PID de bucle simple.
- Si se van a controlar más procesos, se puede usar más de un puente.
- Los puentes pueden ubicarse en puntos convenientes alrededor de una planta.
- El puente generalmente no muestra información, ni tiene botones para presionar. Es simplemente una puerta de enlace electrónica; toda interacción con él se hace a través del PC. Aunque Fieldbus es teóricamente una tecnología común, hay diferencias entre los productos y protocolos usados por diferentes fabricantes. Nombres comúnmente encontrados en Fieldbus incluyen:
![]()
Notas importantes: Los protocolos y productos Fieldbus no son directamente compatibles entre sí. Hay formas de integrar diferentes Fieldbus pero esto puede ser costoso. Esto significa que los usuarios generalmente adoptarán un sistema exclusivamente.
- Los sistemas Fieldbus pueden integrar instrumentos basados en señales más antiguos (4 - 20 mA, 0 - 10 V etc.). Sin embargo, las señales deben interconectarse al Fieldbus por unidades de I / O y al hacerlo se pierden muchos (pero no todos) los beneficios del Fieldbus.
- Esto significa que una vez que un sistema Fieldbus particular se ha adoptado en una planta, es inusual que el usuario considere siquiera un protocolo alternativo. A medida que la tecnología de control avanza, también lo hace el PC. Las computadoras pueden comunicarse entre sí a través de redes (LAN - Red de Área Local): Los departamentos de Finanzas, Almacenes, Producción, Marketing y Ventas dentro de una organización podrían fácilmente compartir datos, y tener diferentes niveles de autoridad para realizar diversas tareas. Inevitablemente, la computadora de control de procesos se ha conectado a la red, permitiendo al personal autorizado ver y modificar la operación de la planta desde una PC en una oficina.
A medida que la manufactura se ha globalizado, se han desarrollado Redes de Área Amplia (WAN). Consecuentemente, un ingeniero ubicado en Londres podría, por ejemplo, interrogar una computadora de planta en la planta de su empresa en Nueva York.
El impacto de esta tecnología de control y comunicaciones es enorme. El conocimiento, la experiencia y el equipo ahora existen donde:
- La computadora de almacén de un cliente, respondiendo a un comando de ‘stock mínimo’ o un plan de producción, puede hacer un pedido a través de Internet.
- El pedido es recibido por la computadora del proveedor que:
- Interroga el almacén para el producto y lo despacha, o
- Modifica el programa de producción para incluir el pedido, quizás incluso modificando las instrucciones del proceso para producir un producto particular.
• La computadora organiza el despacho del producto y factura al cliente.
• No se requiere intervención humana. Beneficios de la tecnología Fieldbus Instalación:
- Reducción de hardware del sistema: Se requieren menos controladores y menos cableado para controlar el proceso.
- Reducción de costes de instalación: No solo hay menos equipo que instalar, la instalación es más simple y rápida, consecuentemente esto significa una reducción muy significativa en costes de material y mano de obra para instalar cable, bandejas de cableado, conductos, armarios de concentración, cajas de conexión y bloques de terminales.
- Menos espacio requerido: Debido a que hay menos equipo y menos cableado en la sala de control, más espacio está disponible para otros usos. Igualmente se deduce que habrá más espacio para equipo de producción en la planta.
- Planos de ingeniería: La computadora produce automáticamente los planos de lógica de proceso, por lo que siempre son precisos y actualizados. Operación:
- Seguridad: Las acciones de estado de fallo están integradas en el software con acciones específicas definidas. En caso de un fallo de la computadora principal, el control recae a los puentes ‘locales’ que tienen suministros de energía independientes y están programados para establecer un ‘modo seguro’ predeterminado relevante para el proceso.
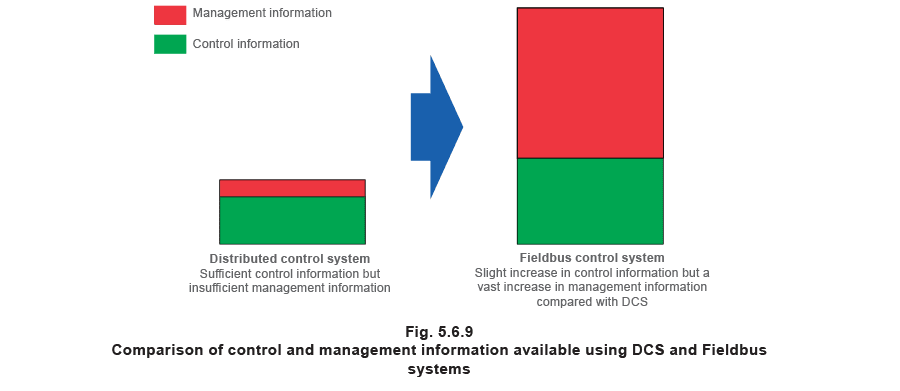
- Aumento de información del proceso: La cantidad de información disponible para operadores y gestión se multiplica muchas veces comparado con un Sistema de Control Distribuido (DCS), ver Figura 5.6.9. Los dispositivos individuales (como sensores y válvulas) son fácilmente interrogados, vistos y analizados. El proceso completo, o partes individuales del proceso, pueden verse y analizarse para identificar restricciones, capacidad de mejora, etc.
- Mantenimiento proactivo - La computadora principal puede llevar a cabo rutinas de diagnóstico detalladas, probando fallos de sensor, fallos de salida, fallos de memoria, errores de configuración, errores de comunicación, posición de válvula y tiempo de recorrido de válvula usado, acción stick-slip, etc. Consecuentemente, el mantenimiento y la calibración se basan en la condición real del dispositivo más que en un período de tiempo, por lo que el mantenimiento se reduce a solo lo necesario. Varios dispositivos pueden realizar rutinas de mantenimiento y calibración al mismo tiempo. Esto significa paradas más cortas o menos frecuentes, dando mayor disponibilidad de planta. Se evita el desperdicio de tiempo, materiales y mano de obra en mantenimiento innecesario, lo que significa que el coste del mantenimiento se minimiza.
- Fiabilidad del sistema - El mantenimiento proactivo significa que el equipo está bien mantenido.
- Control de calidad - El control centralizado y la capacidad de ver el proceso en partes o en total, mejora el control de calidad.
- Mantenimiento de stocks - La respuesta y flexibilidad mejoradas de la planta significan que el inventario de productos a menudo puede reducirse.
- Repuestos - Debido a la compatibilidad e intercambiabilidad de componentes, el usuario no está atado a un solo proveedor de componentes, por lo que los precios son competitivos. También significa que el inventario de repuestos puede minimizarse, ahorrando costes nuevamente.
- Comunicaciones - El sistema de control o cualquiera de sus componentes puede accederse desde prácticamente cualquier lugar, ya sea a través de redes de computadoras o Internet. Desarrollo de un sistema Fieldbus Flexibilidad:
- El sistema puede actualizarse fácilmente para operar con requisitos de proceso revisados.
- El sistema puede expandirse fácilmente para asumir expansiones de planta o nuevos procesos.
- La compatibilidad con otros sistemas significa que el equipo puede adquirirse a precios competitivos.