Uma explicação de cada componente de um sistema de controle, incluindo válvulas, atuadores, sensores e controladores; juntamente com uma introdução aos métodos de controle e dinâmica do sistema, incluindo malhas de controle simples e sistemas de realimentação.
O que são Malhas de Controle?
O que são Malhas de Controle?
Este Módulo introduz a discussão sobre sistemas de controle completos, compostos pela válvula, atuador, sensor, controlador e a dinâmica do processo em si. Malhas de controle
Um sistema de controle de malha aberta
Controle de malha aberta simplesmente significa que não há realimentação direta da condição controlada; em outras palavras, nenhuma informação é enviada de volta do processo ou sistema sob controle para informar ao controlador que uma ação corretiva é necessária. O sistema de aquecimento mostrado na Figura 5.3.1 demonstra isso usando um sensor fora do aquecimento. O sistema mostrado na Figura 5.3.1 não é um exemplo de um sistema de controle de aquecimento prático; está sendo usado apenas para retratar o princípio do controle de malha aberta.
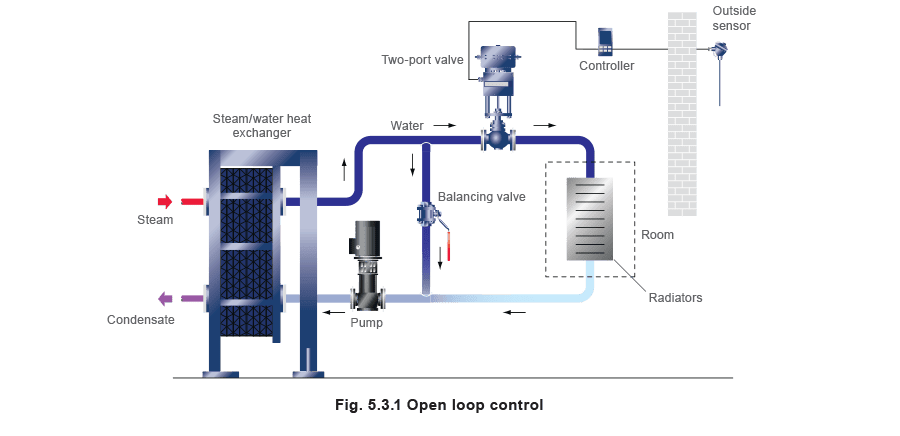
O sistema consiste em um controlador proporcional com um sensor externo que mede a temperatura do ar ambiente. O controlador pode ser configurado com uma banda proporcional bastante ampla, de modo que a uma temperatura ambiente de -1°C a válvula esteja totalmente aberta e a uma temperatura ambiente de 19°C a válvula esteja totalmente fechada. Como a temperatura ambiente terá um efeito sobre a perda de calor do edifício, espera-se que a temperatura do cômodo seja controlada.
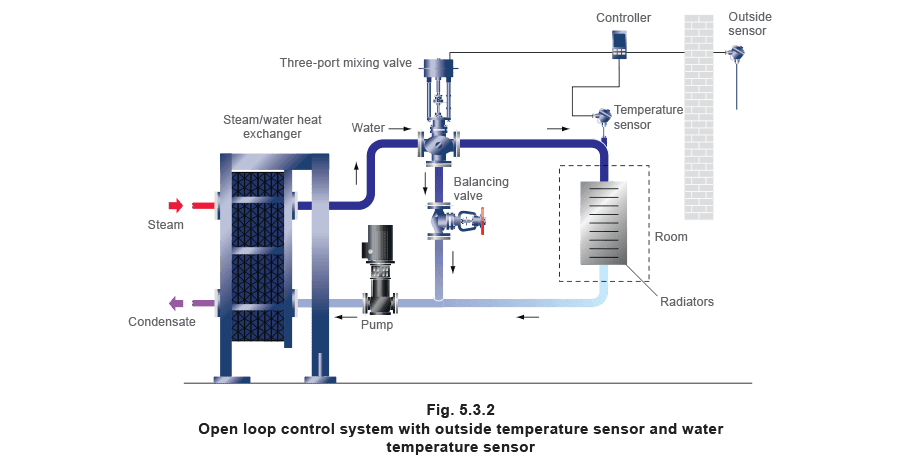
No entanto, não há realimentação quanto à temperatura do cômodo e ao aquecimento devido a outros fatores. Em climas amenos, embora o fluxo de água esteja sendo controlado, outros fatores, como alta radiação solar, podem causar superaquecimento do cômodo. Em outras palavras, o controle aberto tende a fornecer apenas um controle grosseiro da aplicação. A Figura 5.3.2 retrata um sistema de controle um pouco mais sofisticado com dois sensores.
Controle de malha fechada
O sistema usa uma válvula de mistura de três vias com um atuador, controlador e sensor de ar externo, mais um sensor de temperatura na linha de água.
O sensor de temperatura externa fornece uma entrada de setpoint remoto ao controlador, que é usada para compensar o setpoint de temperatura da água. Dessa forma, o controle de malha fechada se aplica à temperatura da água que flui pelos radiadores. Quando está frio do lado de fora, a água flui pelo radiador em sua temperatura máxima. À medida que a temperatura externa sobe, o controlador reduz automaticamente a temperatura da água que flui pelos radiadores. No entanto, isso ainda é controle de malha aberta no que diz respeito à temperatura do cômodo, pois não há realimentação do edifício ou espaço aquecido. Se os radiadores forem supradimensionados ou erros de projeto tiverem ocorrido, o superaquecimento ainda ocorrerá.
Controle de malha fechada
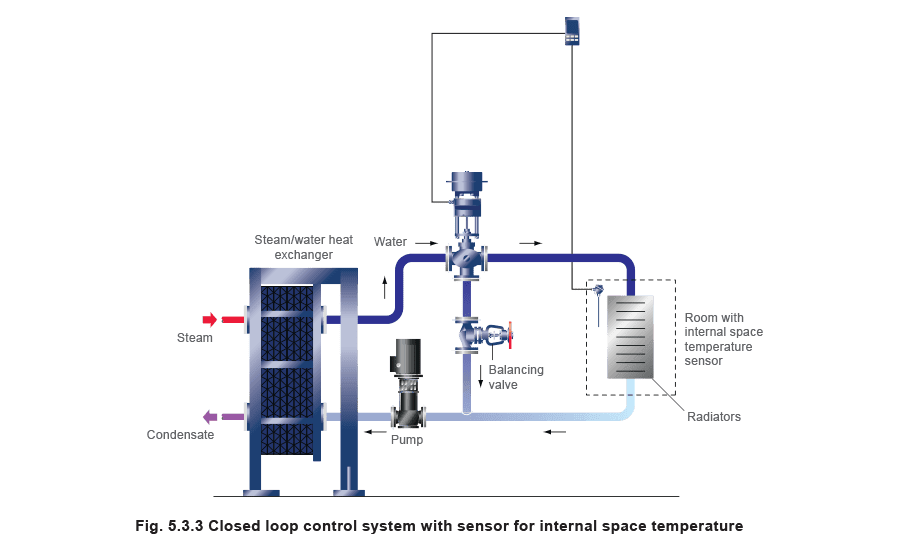
De forma bem simples, um controle de malha fechada requer realimentação; informações enviadas de volta diretamente do processo ou sistema. Usando o sistema de aquecimento simples mostrado na Figura 5.3.3, a adição de um sensor interno de temperatura do espaço detectará a temperatura do cômodo e fornecerá controle de malha fechada em relação ao cômodo. Na Figura 5.3.3, a válvula e o atuador são controlados via um sensor de temperatura do espaço no cômodo, fornecendo realimentação da temperatura real do cômodo.
Perturbações
Perturbações
Perturbações são fatores que entram no processo ou sistema para perturbar o valor do meio controlado. Essas perturbações podem ser causadas por mudanças na carga ou por influências externas. Por exemplo; se em um sistema de aquecimento simples, um cômodo fosse subitamente cheio de pessoas, isso constituiria uma perturbação, pois afetaria a temperatura do cômodo e a quantidade de calor necessária para manter a temperatura do espaço desejada.
Controle por realimentação
Controle por realimentação
Este é outro tipo de controle de malha fechada. O controle por realimentação leva em conta as perturbações e alimenta essa informação de volta ao controlador, para permitir que a ação corretiva seja tomada. Por exemplo, se um grande número de pessoas entrar em um cômodo, a temperatura do espaço aumentará, o que fará com que o sistema de controle reduza a entrada de calor no cômodo.
Controle por antecipação
Controle por antecipação
Com o controle por antecipação, os efeitos de quaisquer perturbações são antecipados e considerados antes que o evento realmente ocorra. Um exemplo disso é trazer a caldeira a fogo alto antes de colocar uma grande planta de processo de uso de vapor em operação. A sequência de eventos pode ser que a planta de processo seja ligada. Essa ação, em vez de abrir a válvula de vapor para o processo, instrui o queimador da caldeira a fogo alto. Somente quando a posição de fogo alto é alcançada é que a válvula de vapor do processo é permitida a abrir, e então de forma lenta e controlada.
Controle de malha única
Controle de malha única
Este é o malha de controle mais simples envolvendo apenas uma variável controlada, por exemplo, temperatura. Para explicar isso, um trocador de calor vapor-para-água é considerado conforme mostrado na Figura 5.3.4.
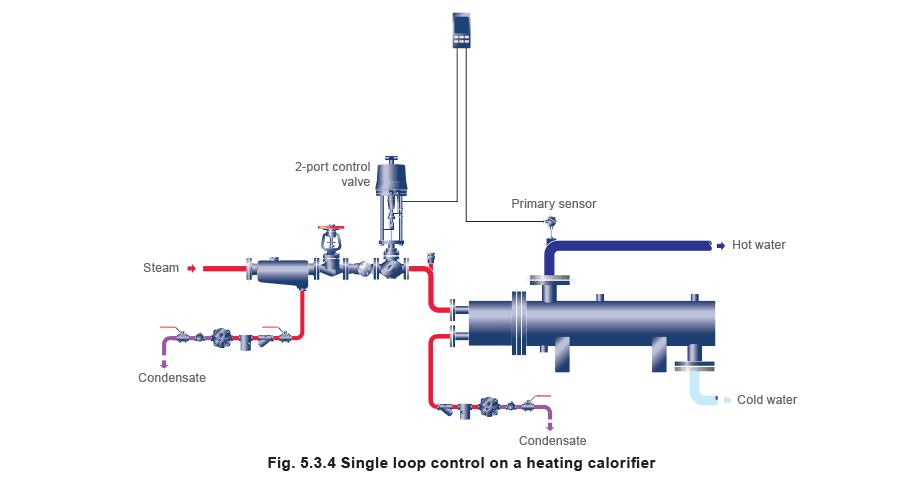
A única variável controlada na Figura 5.3.4 é a temperatura da água que sai do trocador de calor. Isso é obtido controlando a válvula de vapor de 2 vias que fornece vapor ao trocador de calor. O sensor primário pode ser um termopar ou um termômetro de resistência de platina PT100 que mede a temperatura da água.
O controlador compara o sinal do sensor com o setpoint no controlador. Se houver uma diferença, o controlador envia um sinal ao atuador da válvula, que por sua vez move a válvula para uma nova posição. O controlador também pode incluir um indicador de saída, que mostra a porcentagem de abertura da válvula. Malhas de controle único fornecem a grande maioria do controle para sistemas de aquecimento e processos industriais. Outros termos usados para malhas de controle único incluem:
- Controle de valor de setpoint
- Controle de malha fechada único
- Controle por realimentação.
Controle multi-malha
Controle multi-malha
O exemplo a seguir considera uma aplicação para um produto à base de madeira de movimento lento, que deve ser controlado em um nível de umidade específico (veja Figuras 5.3.5 e 5.3.6).
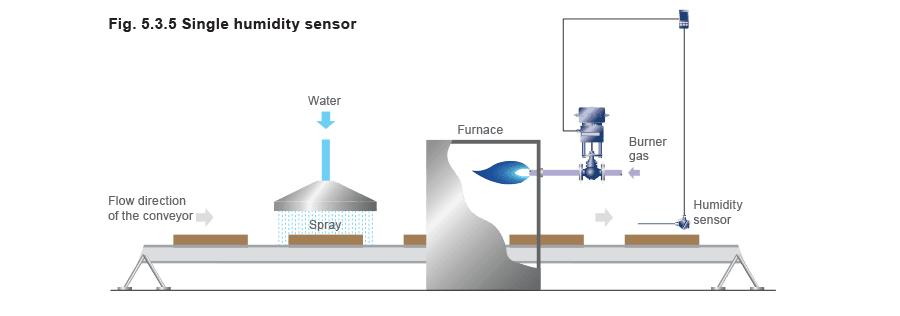
Na Figura 5.3.5, o sensor de umidade único no final da esteira controla a quantidade de calor adicionado pelo forno. Mas se a taxa de aspersão de água mudar devido, por exemplo, a flutuações na pressão de fornecimento de água, pode levar talvez 10 minutos antes que o produto alcance a extremidade distante da esteira e o sensor de umidade reaja. Isso causará variações na qualidade do produto.
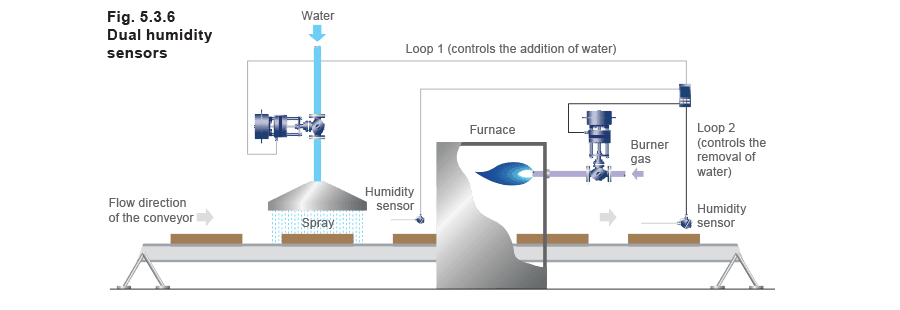
Para melhorar o controle, um segundo sensor de umidade em outra malha de controle pode ser instalado imediatamente após a aspersão de água, conforme mostrado na Figura 5.3.6. Este sensor de umidade fornece uma entrada de setpoint remoto ao controlador que é usada para compensar o setpoint local. O setpoint local é definido na umidade desejada após o forno. Isso, em uma forma simples, ilustra o controle multi-malha. Este sistema de controle de umidade consiste em duas malhas de controle:
- A malha 1 controla a adição de água.
- A malha 2 controla a remoção de água. Dentro deste processo, fatores influenciarão ambas as malhas. Alguns fatores, como a pressão da água, afetarão ambas as malhas. A malha 1 tentará corrigir isso, mas qualquer erro resultante terá um impacto na malha 2.
Controle em cascata
Controle em cascata
Quando duas variáveis independentes precisam ser controladas com uma válvula, um sistema de controle em cascata pode ser usado. A Figura 5.3.7 mostra um vaso com camisa de vapor cheio de produto líquido. Os aspectos essenciais do processo são bastante rigorosos:
- O produto no vaso deve ser aquecido a uma certa temperatura.
- O vapor não deve exceder uma certa temperatura ou o produto pode ser prejudicado.
- A temperatura do produto não deve aumentar mais rápido que uma certa taxa ou o produto pode ser prejudicado. Se um controle normal de malha única fosse usado com o sensor no líquido, no início do processo o sensor detectaria uma temperatura baixa, e o controlador sinalizaria a válvula para se mover para a posição totalmente aberta. Isso resultaria em um problema causado por uma temperatura excessiva de vapor na camisa.
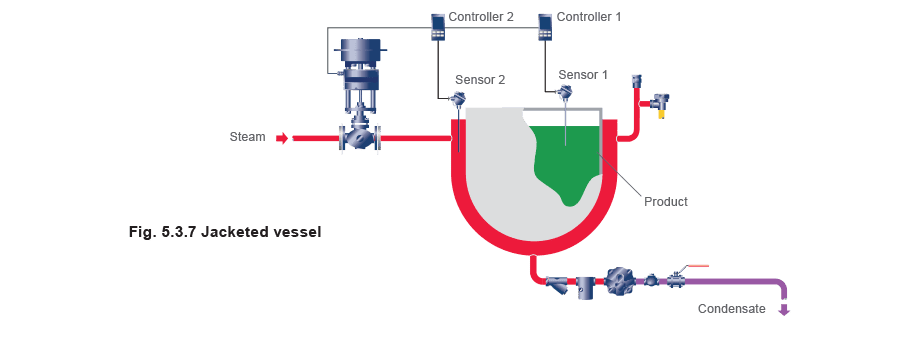
A solução é usar um controle em cascata usando dois controladores e dois sensores:
- Um controlador escravo (Controlador 2) e sensor monitorando a temperatura do vapor na camisa, e emitindo um sinal para a válvula de controle.
- Um controlador mestre (Controlador 1) e sensor monitorando a temperatura do produto com a saída do controlador direcionada ao controlador escravo.
- O sinal de saída do controlador mestre é usado para variar o setpoint no controlador escravo, garantindo que a temperatura do vapor não seja excedida. Exemplo 5.3.1 Um exemplo de controle em cascata aplicado a um vaso de processo A temperatura do líquido deve ser aquecida de 15°C para 80°C e mantida em 80°C por duas horas. A temperatura do vapor não pode exceder 120°C em nenhuma circunstância. A temperatura do produto não deve aumentar mais rápido que 1°C/minuto. O controlador mestre pode ser ajustado para que a taxa de aumento da temperatura da água não seja superior à especificada. O controlador mestre é configurado em modo de ação reversa, de modo que seu sinal de saída para o controlador escravo seja 20 mA em baixa temperatura e 4 mA em alta temperatura. O setpoint remoto no controlador escravo é configurado de modo que seu sinal de saída para a válvula seja 4 mA quando a temperatura do vapor for 80°C, e 20 mA quando a temperatura do vapor for 120°C. Dessa forma, a temperatura do vapor não pode ser mais alta do que a tolerada pelo sistema, e a pressão do vapor na camisa não pode ser mais alta do que a pressão de saturação de 1 bar g a 120°C.
Dinâmica do processo
Dinâmica do processo
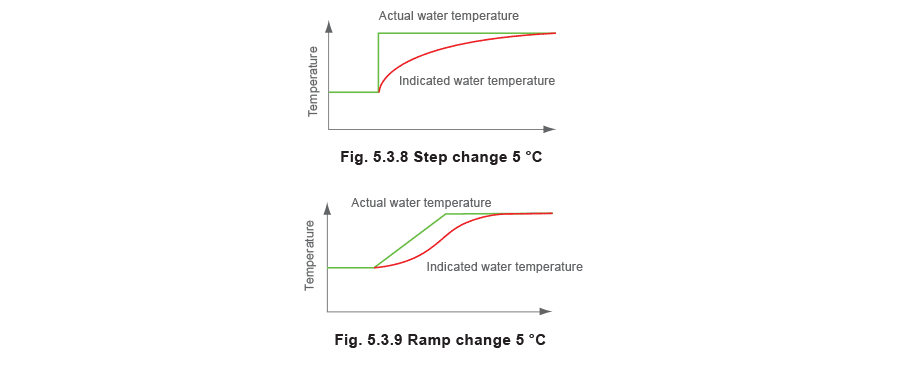
Este é um assunto muito complexo, mas esta parte do texto abordará as considerações mais básicas. O termo ‘constante de tempo’, que lida com a definição do tempo de movimento do atuador, já foi esboçado no Módulo 5.1; mas para reiterar, é o tempo necessário para que um sistema de controle alcance aproximadamente dois terços de seu movimento total como resultado de uma determinada mudança degrau em temperatura ou outra variável. Outras partes do sistema de controle terão respostas baseadas em tempo semelhantes - o controlador e seus componentes e o sensor em si. Todos os instrumentos têm um atraso de tempo entre a entrada no instrumento e sua saída subsequente. Mesmo o sistema de transmissão terá um atraso de tempo - não um problema com sistemas elétricos/eletrônicos, mas um fator que pode precisar ser considerado com sistemas de transmissão pneumática. As Figuras 5.3.8 e 5.3.9 mostram alguns atrasos de resposta típicos para um termopar que foi instalado em um poço para medir a temperatura da água.
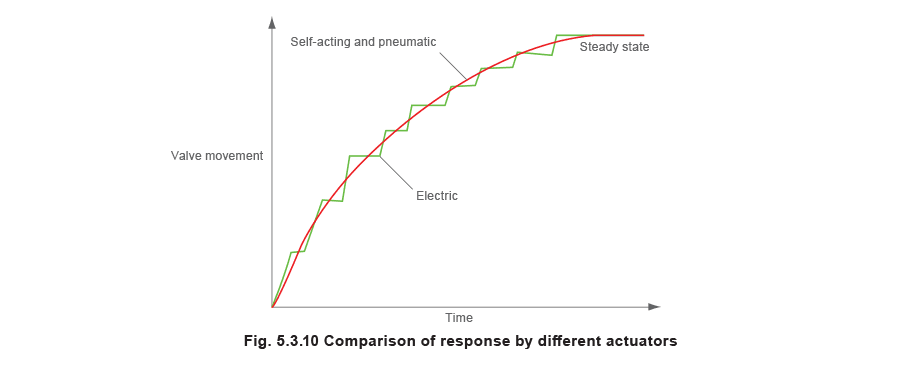
Além dos atrasos na resposta do sensor, outras partes do sistema de controle também afetam o tempo de resposta. Com sistemas pneumáticos e auto-ajustáveis, o movimento da válvula/atuador tende a ser suave e, em um controlador proporcional, diretamente proporcional ao desvio de temperatura no sensor.
Com um atuador elétrico há um atraso devido ao tempo necessário para o motor mover a articulação de controle. Como o sinal de controle é uma série de pulsos, o motor fornece rajadas de movimento seguidas por períodos onde o atuador está parado. O diagrama de resposta (Figura 5.3.10) retrata isso. No entanto, devido a atrasos na resposta do processo, a temperatura controlada final pode ainda ser suave.
Os sistemas de controle abordados neste Módulo consideraram apenas condições de regime permanente. No entanto, o processo ou planta sob controle pode estar sujeito a variações seguindo um determinado padrão de comportamento. O sistema de controle é necessário para fazer o processo se comportar de maneira previsível. Se o processo é um que muda rapidamente, então o sistema de controle deve ser capaz de reagir rapidamente.
Se o processo sofre mudança lenta, as demandas sobre a velocidade operacional do sistema de controle não são tão rigorosas. Muito está documentado sobre o comportamento estático e dinâmico de controladores e sistemas de controle - sensibilidade, tempo de resposta e assim por diante. Possivelmente o fator mais importante de consideração é o atraso de tempo da malha de controle completa. A dinâmica do processo precisa ser considerada para selecionar o tipo correto de controlador, sensor e atuador.
Reações do processo
Reações do processo
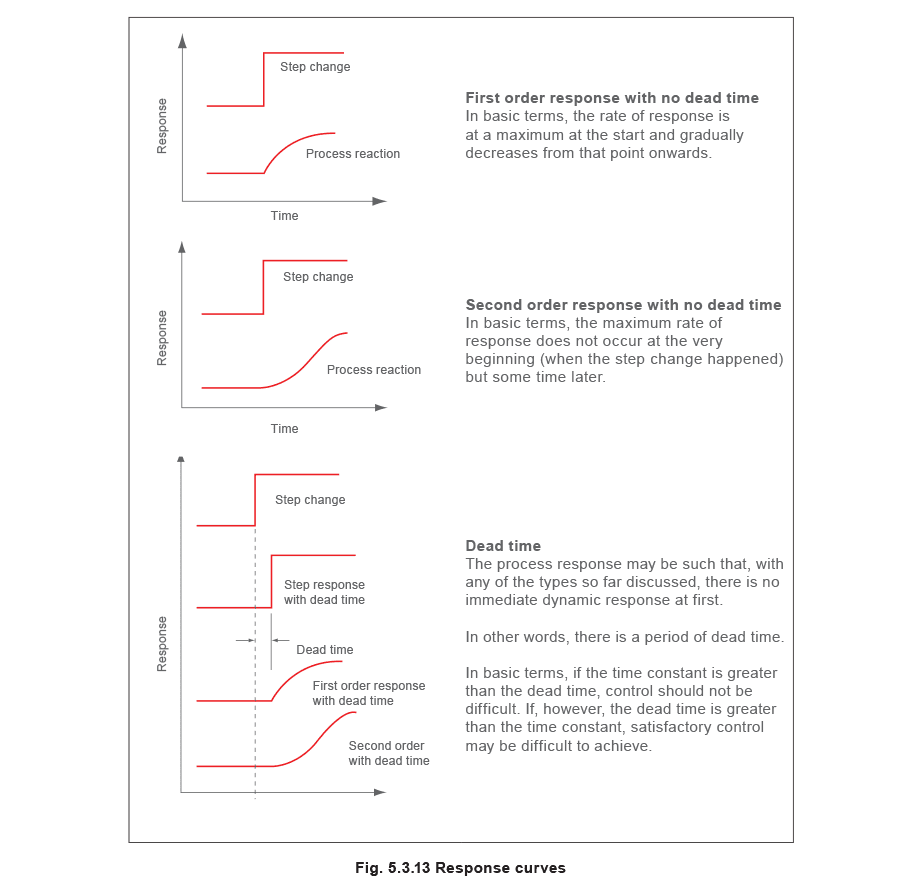
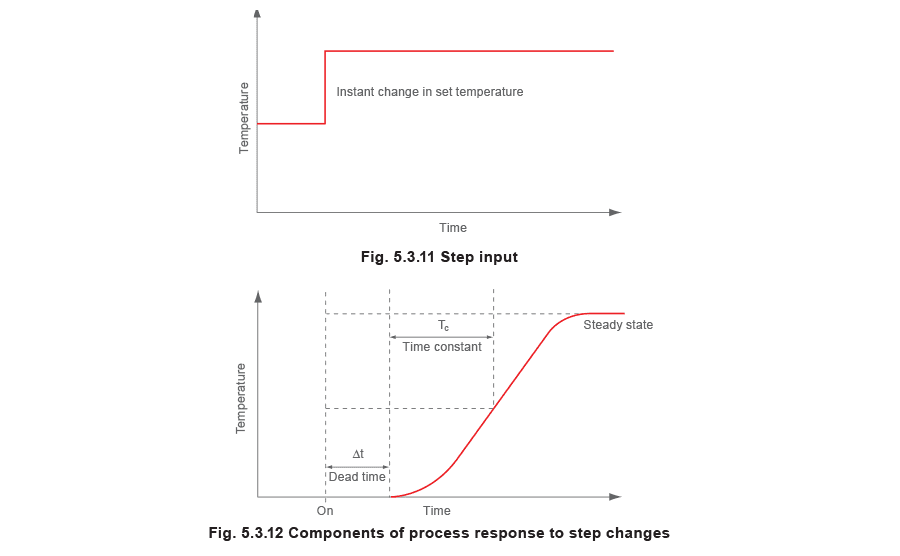
Essas características dinâmicas são definidas pela reação do processo a uma mudança repentina nas configurações de controle, conhecida como entrada degrau. Isso pode incluir uma mudança imediata na temperatura de setpoint, conforme mostrado na Figura 5.3.11. A resposta do sistema é retratada na Figura 5.3.12, que mostra uma certa quantidade de tempo morto antes que a temperatura do processo comece a aumentar. Esse tempo morto é devido ao atraso de controle causado por coisas como um atuador elétrico se movendo para sua nova posição. A constante de tempo diferirá de acordo com a resposta dinâmica do sistema, afetada por coisas como se o sensor está alojado em um poço ou não.
A resposta de quaisquer dois processos pode ter características diferentes devido ao sistema.
Os efeitos do tempo morto e da constante de tempo na resposta do sistema a uma mudança repentina de entrada são mostrados graficamente na Figura 5.3.12. Sistemas que têm uma taxa de resposta inicial rápida a mudanças de entrada são geralmente referidos como possuindo uma resposta de primeira ordem. Sistemas que têm uma taxa de resposta inicial lenta a mudanças de entrada são geralmente referidos como possuindo uma resposta de segunda ordem. Uma visão geral dos tipos básicos de resposta do processo (efeitos do tempo morto, resposta de primeira ordem e resposta de segunda ordem) é mostrada na Figura 5.3.13.