Teoria Básica de Controle
Este tutorial analisa os modos de controle liga/desliga e contínuo.
Ele introduz as ações de controle proporcional, integral e derivativo e explica parte da terminologia.
Modos de controle
Modos de controle
Um controle automático de temperatura pode consistir em uma válvula, atuador, controlador e sensor detectando a temperatura ambiente em um cômodo. Diz-se que o sistema de controle está ‘em equilíbrio’ quando o sensor de temperatura ambiente não registra mais ou menos temperatura do que a requerida pelo sistema de controle. O que acontece com a válvula de controle quando o sensor ambiente registra uma mudança na temperatura (um desvio de temperatura) depende do tipo de sistema de controle usado. A relação entre o movimento da válvula e a mudança de temperatura no meio controlado é conhecida como modo de controle ou ação de controle.
Variações de ambos os modos existem, que agora serão examinadas em maior detalhe.
Controle liga/desliga Ocasionalmente conhecido como controle de dois passos ou duas posições, este é o modo de controle mais básico.
Considerando o tanque de água mostrado na Figura 5.2.1, o objetivo é aquecer a água no tanque usando a energia liberada por uma simples bobina de vapor. No tubo de fluxo para a bobina, uma válvula de duas vias e atuador são instalados, completos com um termostato, colocado na água do tanque.
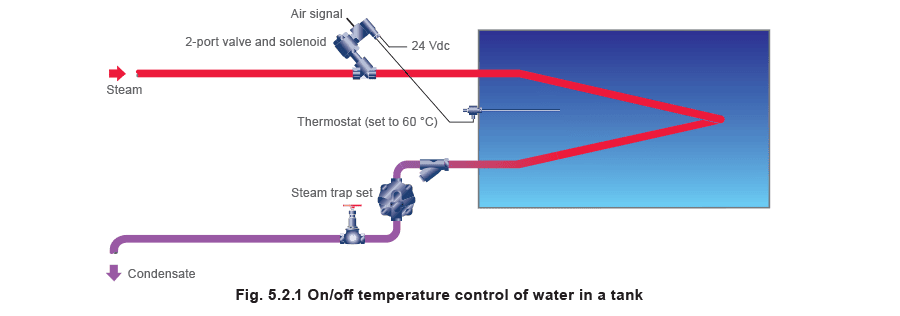
O termostato é ajustado em 60°C, que é a temperatura necessária da água no tanque. A lógica dita que se o ponto de comutação fosse realmente em 60°C, o sistema nunca operaria adequadamente, porque a válvula não saberia se deveria estar aberta ou fechada em 60°C. A partir daí, poderia abrir e fechar rapidamente, causando desgaste.
Por essa razão, o termostato teria um ponto de comutação superior e inferior. Isso é essencial para evitar ciclos muito rápidos. Neste caso, o ponto de comutação superior pode ser 61°C (o ponto em que o termostato diz à válvula para fechar) e o ponto de comutação inferior pode ser 59°C (o ponto em que a válvula é instruída a abrir). Assim, há uma diferença de comutação incorporada no termostato de ±1°C em torno do set point de 60°C. Esses 2°C (±1°C) são conhecidos como diferencial de comutação. (Isso variará entre termostatos). Um diagrama da ação de comutação do termostato seria como o gráfico mostrado na Figura 5.2.2. A temperatura do conteúdo do tanque cairá para 59°C antes que a válvula seja solicitada a abrir e subirá para 61°C antes que a válvula seja instruída a fechar.
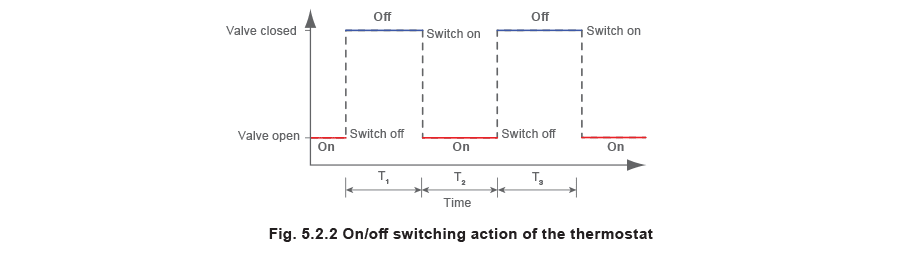
A Figura 5.2.2 mostra linhas de comutação retas, mas o efeito na transferência de calor da bobina para a água não será imediato. Levará tempo para que o vapor na bobina afete a temperatura da água no tanque. Além disso, a água no tanque subirá acima do limite superior de 61°C e cairá abaixo do limite inferior de 59°C. Isso pode ser explicado cruzando as Figuras 5.2.2 e 5.2.3. Primeiro, no entanto, é necessário descrever o que está acontecendo.
No ponto A (59°C, Figura 5.2.3) o termostato liga, direcionando a válvula totalmente aberta. Leva tempo para que a transferência de calor da bobina afete a temperatura da água, como mostrado pelo gráfico da temperatura da água na Figura 5.2.3. No ponto B (61°C) o termostato desliga e permite que a válvula feche. No entanto, a bobina ainda está cheia de vapor, que continua a condensar e ceder seu calor. Portanto, a temperatura da água continua a subir acima da temperatura de comutação superior, e ‘ultrapassa’ no ponto C, antes de eventualmente cair.
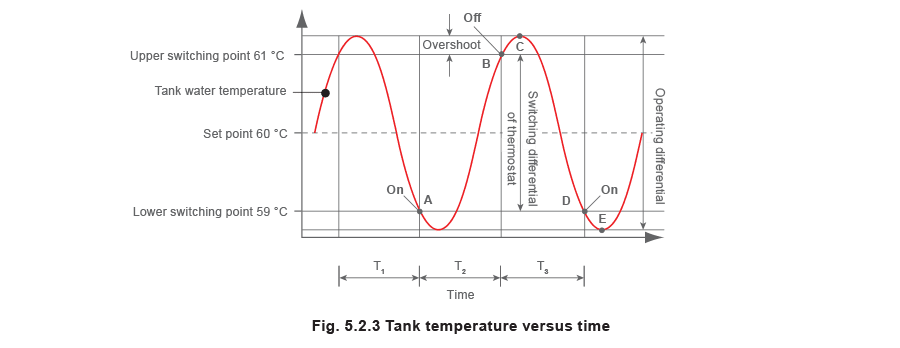
A partir deste ponto, a temperatura da água no tanque continua a cair até que, no ponto D (59°C), o termostato diz à válvula para abrir. O vapor é admitido através da bobina mas, novamente, leva tempo para ter efeito e a temperatura da água continua a cair por um tempo, atingindo seu vale de subcorreção no ponto E.
A diferença entre o pico e o vale é conhecida como diferencial operacional. O diferencial de comutação do termostato depende do tipo de termostato usado. O diferencial operacional depende das características da aplicação, como o tanque, seu conteúdo, as características de transferência de calor da bobina, a taxa com que o calor é transferido ao termostato, etc. Essencialmente, com controle liga/desliga, existem limites de comutação superior e inferior, e a válvula está totalmente aberta ou totalmente fechada - não há estado intermediário. No entanto, existem controladores que fornecem um controle de tempo proporcional, no qual é possível alterar a razão do tempo ‘ligado’ em relação ao tempo ‘desligado’ para controlar a condição controlada. Essa ação proporcional ocorre dentro de uma largura de banda selecionada em torno do set point; o set point sendo o ponto médio da largura de banda. Se a condição controlada estiver fora da largura de banda, o sinal de saída do controlador estará totalmente ligado ou totalmente desligado, atuando como um dispositivo liga/desliga. Se a condição controlada estiver dentro da largura de banda, a saída do controlador é ligada e desligada em relação ao desvio entre o valor da condição controlada e o set point. Com a condição controlada no set point, a razão do tempo ‘ligado’ para o tempo ‘desligado’ é 1:1, ou seja, o tempo ‘ligado’ é igual ao tempo ‘desligado’. Se a condição controlada estiver abaixo do set point, o tempo ‘ligado’ será mais longo que o tempo ‘desligado’, enquanto se estiver acima do set point, o tempo ‘desligado’ será mais longo, em relação ao desvio dentro da largura de banda. As principais vantagens do controle liga/desliga são que é simples e de custo muito baixo. É por isso que é frequentemente encontrado em aplicações domésticas como caldeiras de aquecimento central e ventiladores aquecedores. Sua principal desvantagem é que o diferencial operacional pode ficar fora da tolerância de controle requerida pelo processo. Por exemplo, em uma linha de produção de alimentos, onde o sabor e a repetibilidade do sabor são determinados pelo controle preciso de temperatura, o controle liga/desliga pode bem ser inadequado. Em contraste, no caso de aquecimento de ambientes, frequentemente há grandes capacidades de armazenamento (uma grande área para aquecer ou resfriar que responderá à mudança de temperatura lentamente) e pequenas variações no valor desejado são aceitáveis. Em muitos casos, o controle liga/desliga é bastante apropriado para esse tipo de aplicação. Se o controle liga/desliga for inadequado porque um controle de temperatura mais preciso é necessário, a próxima opção é o controle contínuo.
Controle contínuo
Controle contínuo
O controle contínuo é frequentemente chamado de controle modulante. Significa que a válvula é capaz de se mover continuamente para alterar o grau de abertura ou fechamento da válvula. Ela não apenas se move para totalmente aberta ou totalmente fechada, como no controle liga/desliga. Existem três ações de controle básicas que são frequentemente aplicadas ao controle contínuo:
Também é necessário considerá-los em combinação, como P + I, P + D, P + I + D. Embora seja possível combinar as diferentes ações, e todas ajudam a produzir a resposta necessária, é importante lembrar que tanto as ações integral quanto derivativa são geralmente funções corretivas de uma ação de controle proporcional básica.
As três ações de controle são consideradas abaixo.
Controle proporcional
Controle proporcional
Este é o mais básico dos modos de controle contínuo e é geralmente referido pela letra ‘P’. O objetivo principal do controle proporcional é controlar o processo à medida que as condições mudam. Esta seção mostra que:
- Quanto maior a banda proporcional, mais estável o controle, mas maior o offset.
- Quanto mais estreita a banda proporcional, menos estável o processo, mas menor o offset.
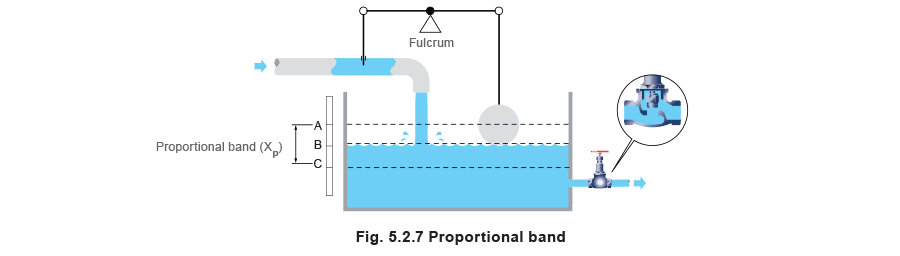
- O objetivo, portanto, deve ser introduzir a banda proporcional aceitável mais estreita que sempre mantenha o processo estável com o offset mínimo. Ao explicar o controle proporcional, vários novos termos devem ser introduzidos. Para defini-los, uma analogia simples pode ser considerada - um tanque de água fria é abastecido com água através de uma válvula de controle operada por flutuador e com uma válvula de globo no tubo de saída, válvula ‘V’, como mostrado na Figura 5.2.4. Ambas as válvulas são do mesmo tamanho e têm a mesma capacidade de fluxo e característica de fluxo. O nível desejado de água no tanque está no ponto B (equivalente ao set point de um controlador de nível). Pode-se assumir que, com a válvula ‘V’ meia aberta (50% de carga) há exatamente a vazão certa de água entrando através da válvula operada por flutuador para fornecer o fluxo desejado através do tubo de descarga e manter o nível de água no tanque no ponto B.
O sistema pode ser dito estar em equilíbrio (a vazão de água entrando e saindo do tanque é a mesma); sob controle, em condição estável (o nível não está variando) e exatamente no nível desejado de água (B); fornecendo o fluxo de saída necessário.
Com a válvula ‘V’ fechada, o nível de água no tanque sobe para o ponto A e a válvula operada por flutuador corta o fornecimento de água (veja a Figura 5.2.5 abaixo). O sistema ainda está sob controle e estável, mas o controle está acima do nível B. A diferença entre o nível B e o nível controlado real, A, está relacionada à banda proporcional do sistema de controle. Novamente, se a válvula ‘V’ for meia aberta para dar 50% de carga, o nível de água no tanque retornará ao nível desejado, ponto B.
Na Figura 5.2.6 abaixo, a válvula ‘V’ está totalmente aberta (100% de carga). A válvula operada por flutuador precisará descer para abrir a válvula de entrada amplamente e admitir uma vazão maior de água para atender à demanda aumentada do tubo de descarga. Quando atingir o nível C, água suficiente estará entrando para atender às necessidades de descarga e o nível de água será mantido no ponto C.
O sistema está sob controle e estável, mas há um offset; o desvio no nível entre os pontos B e C. A Figura 5.2.7 combina as três condições usadas neste exemplo.
A diferença nos níveis entre os pontos A e C é conhecida como Banda Proporcional ou P-band, já que esta é a mudança no nível (ou temperatura no caso de um controle de temperatura) para a válvula de controle se mover de totalmente aberta para totalmente fechada. Um símbolo reconhecido para Banda Proporcional é Xp. A analogia ilustra vários pontos básicos e importantes relacionados ao controle proporcional:
- A válvula de controle é movida proporcionalmente ao erro no nível de água (ou ao desvio de temperatura, no caso de um controle de temperatura) a partir do set point
- O set point só pode ser mantido para uma condição de carga específica.
- Embora o controle estável seja alcançado entre os pontos A e C, qualquer carga que cause uma diferença no nível em relação a B sempre fornecerá um offset.
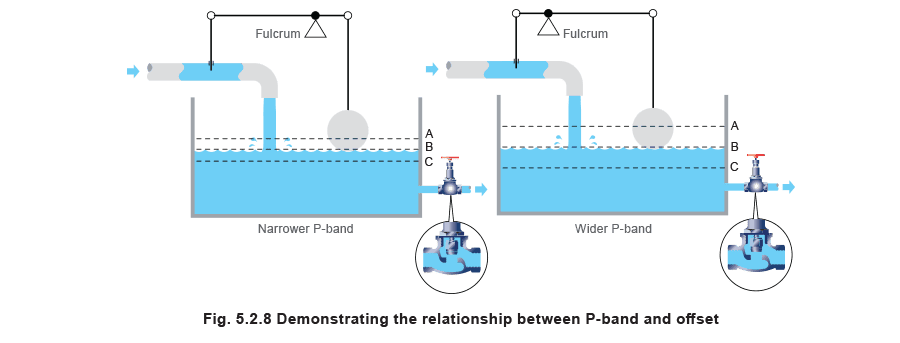
Nota: Alterando a posição do fulcro, a Banda Proporcional do sistema muda. Mais perto do flutuador dá uma P-band mais estreita, enquanto mais perto da válvula dá uma P-band mais larga.
A Figura 5.2.8 ilustra por que isso é assim. Diferentes posições de fulcro requerem diferentes mudanças no nível de água para mover a válvula de totalmente aberta para totalmente fechada. Em ambos os casos, pode-se ver que o nível B representa o nível de 50% de carga, A representa o nível de 0% de carga e C representa o nível de 100% de carga. Também pode-se ver como o offset é maior em qualquer mesma carga com a banda proporcional mais larga.
Os exemplos retratados nas Figuras 5.2.4 a 5.2.8 descrevem a banda proporcional como a mudança de nível (ou talvez temperatura ou pressão etc.) necessária para mover a válvula de totalmente aberta para totalmente fechada. Isso é conveniente para sistemas mecânicos, mas uma definição mais geral (e mais correta) de banda proporcional é a mudança percentual no valor medida necessária para dar uma mudança de 100% na saída. É portanto geralmente expressa em termos percentuais em vez de em unidades de engenharia como graus centígrados.
Para controladores elétricos e pneumáticos, o valor de ajuste está no meio da banda proporcional. O efeito de mudar a P-band para um sistema elétrico ou pneumático pode ser descrito com um exemplo ligeiramente diferente, usando um controle de temperatura. A temperatura ambiente de um edifício é controlada por um sistema de aquecimento de água (tipo radiador) usando uma ação proporcional por uma válvula acionada por um atuador elétrico, e um controlador eletrônico e sensor de temperatura ambiente. O controle selecionado tem uma banda proporcional (P-band ou Xp) de 6% da faixa de entrada do controlador de 0° - 100°C, e a temperatura interna desejada é 18°C.
Sob certas condições de carga, a válvula está 50% aberta e a temperatura interna necessária está correta em 18°C. Uma queda na temperatura externa ocorre, resultando em um aumento na taxa de perda de calor do edifício. Consequentemente, a temperatura interna diminuirá. Isso será detectado pelo sensor de temperatura ambiente, que sinalizará a válvula para se mover para uma posição mais aberta permitindo que água mais quente passe pelos radiadores do cômodo. A válvula é instruída a abrir por uma quantidade proporcional à queda na temperatura do cômodo. Em termos simplistas, se a temperatura do cômodo cair 1°C, a válvula pode abrir 10%; se a temperatura do cômodo cair 2°C, a válvula abrirá 20%. No devido tempo, a temperatura externa se estabiliza e a temperatura interna para de cair. Para fornecer o calor adicional necessário para a temperatura externa mais baixa, a válvula se estabilizará em uma posição mais aberta; mas a temperatura interna real será ligeiramente inferior a 18°C. O Exemplo 5.2.1 e a Figura 5.2.9 explicam isso mais adiante, usando uma P-band de 6°C.
Exemplo 5.2.1 Considere uma aplicação de aquecimento de ambiente com as seguintes características:
Exemplo 5.2.1 Considere uma aplicação de aquecimento de ambiente com as seguintes características:
- A temperatura necessária no edifício é 18°C.
- A temperatura do cômodo é atualmente 18°C, e a válvula está 50% aberta.
- A banda proporcional está ajustada em 6% de 100°C = 6°C, o que dá 3°C de cada lado do set point de 18°C. A Figura 5.2.9 mostra a relação entre temperatura do cômodo e válvula:
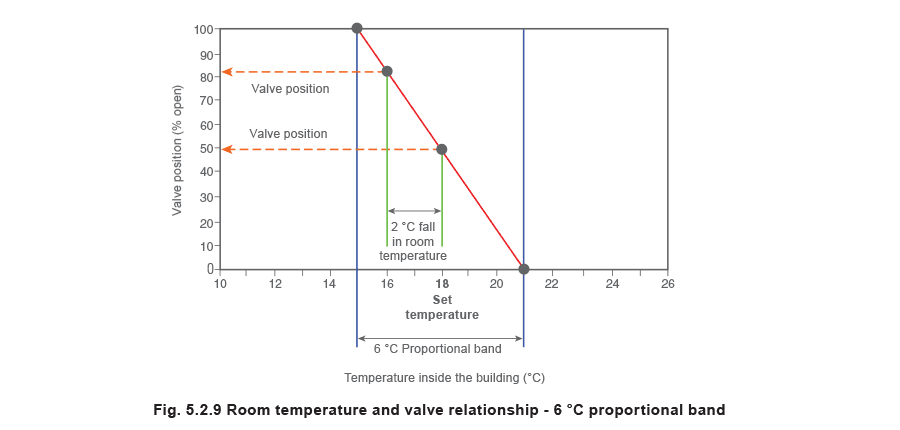
Como exemplo, considere a temperatura do cômodo caindo para 16°C. Isso é uma queda de 2°C em uma banda proporcional de 6°C, em outras palavras, 33,3% da banda proporcional. Portanto, a válvula de controle deve abrir mais 33% para 83%, como mostrado na Figura 5.2.9.
Com controle proporcional, se a carga mudar, o offset também mudará:
- Uma carga inferior a 50% fará com que a temperatura do cômodo esteja acima do valor de ajuste.
- Uma carga superior a 50% fará com que a temperatura do cômodo esteja abaixo do valor de ajuste. O desvio entre a temperatura de ajuste no controlador (o set point) e a temperatura real do cômodo é chamado de ‘offset proporcional’. No Exemplo 5.2.1, desde que as condições de carga permaneçam as mesmas, o controle permanecerá estável em uma abertura de válvula de 83,3%; isso é chamado de ‘offset sustentado’.
The effect of adjusting the P-band
O efeito de ajustar a P-band
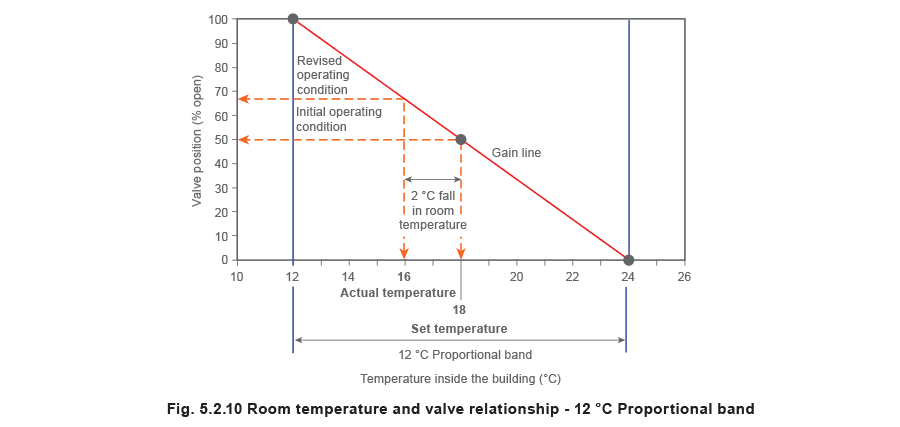
Em controladores eletrônicos e pneumáticos, a P-band é ajustável. Isso permite ao usuário encontrar uma configuração adequada para a aplicação individual. Aumentando a P-band - Por exemplo, se a aplicação anterior tivesse sido programada com uma banda proporcional de 12% equivalente a 12°C, os resultados podem ser vistos na Figura 5.2.10. Observe que a P-band mais larga resulta em uma linha de ‘ganho’ menos íngreme. Para a mesma mudança na temperatura do cômodo, o movimento da válvula será menor. O termo ‘ganho’ é discutido em uma seção seguinte. Neste caso, a queda de 2°C na temperatura do cômodo daria uma abertura de válvula de cerca de 68% do gráfico na Figura 5.2.10.
Reduzindo a P-band - Inversamente, se a P-band for reduzida, o movimento da válvula por incremento de temperatura é aumentado. No entanto, reduzir a P-band a zero dá um controle liga/desliga. A P-band ideal é a mais estreita possível sem produzir uma oscilação perceptível na temperatura real do cômodo.
Gain
Ganho
O termo ‘ganho’ é frequentemente usado com controladores e é simplesmente o recíproco da banda proporcional. The larger the controller gain, the more the controller output will change for a given error. For instance for a gain of 1, an error of 10% of scale will change the controller output by 10% of scale, for a gain of 5, an error of 10% will change the controller output by 50% of scale, whilst for a gain of 10, an error of 10% will change the output by 100% of scale. The proportional band in ‘degree terms’ will depend on the controller input scale. For instance, for a controller with a 200°C input scale: An Xp of 20% = 20% of 200°C = 40°C An Xp of 10% = 10% of 200°C = 20°C The Steam and Condensate Loop 5.2.8 Example 5.2.2 Let the input span of a controller be 100°C.
As a reminder:
As a reminder:
- A wide proportional band (small gain) will provide a less sensitive response, but a greater stability.
- A narrow proportional band (large gain) will provide a more sensitive response, but there is a practical limit to how narrow the Xp can be set.
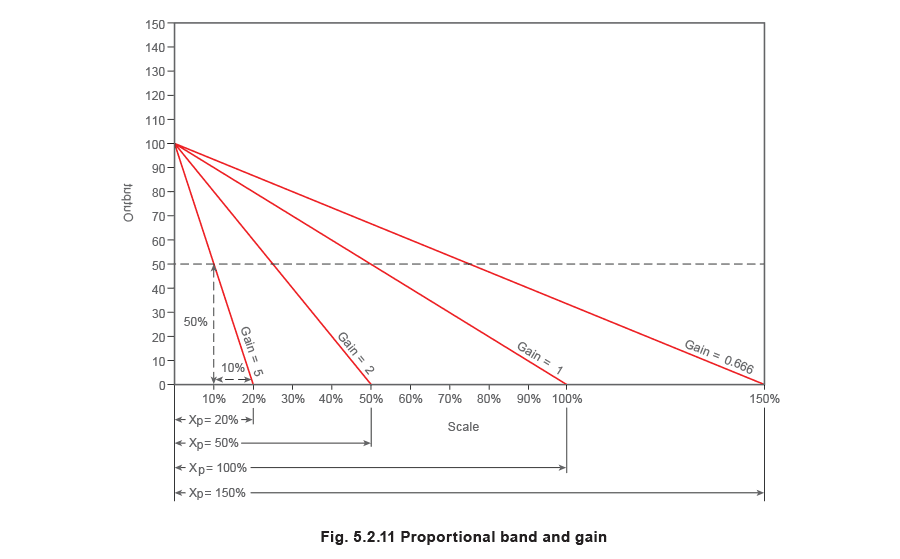
- Too narrow a proportional band (too much gain) will result in oscillation and unstable control. For any controller for various P-bands, gain lines can be determined as shown in Figure 5.2.11, where the controller input span is 100°C.
Reverse or direct acting control signal
Sinal de controle reverso ou direto
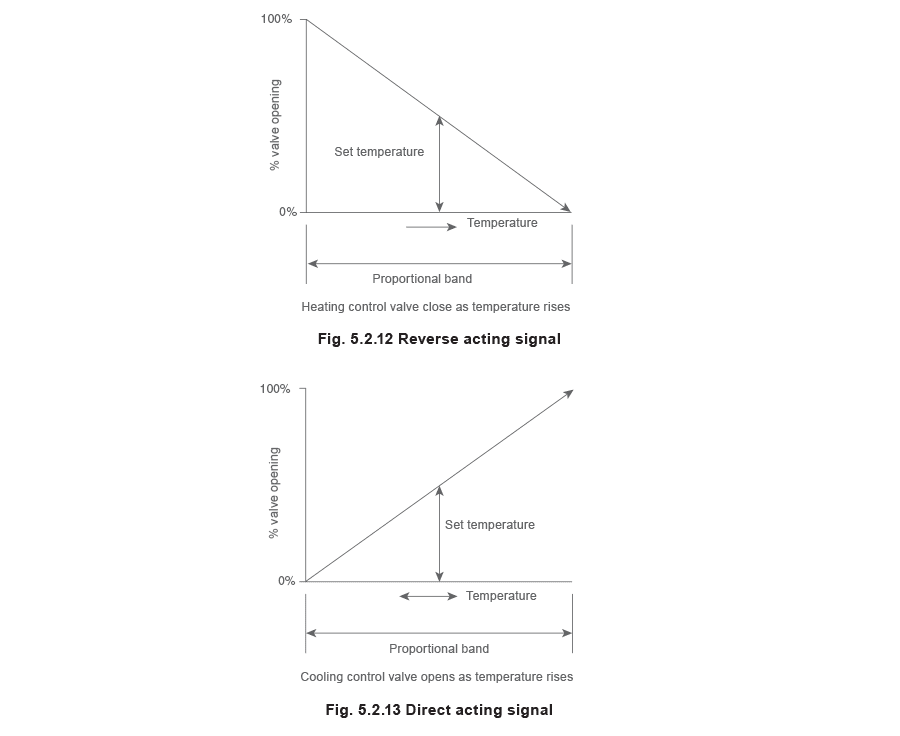
Uma olhada mais de perto nas figuras usadas até agora para descrever o efeito do controle proporcional mostra que a saída é assumida como sendo de ação reversa. Em outras palavras, um aumento na temperatura do processo faz o sinal de controle cair e a válvula fechar. Essa é geralmente a situação em controles de aquecimento. Essa configuração não funcionaria em um controle de resfriamento; aqui a válvula deve abrir com um aumento de temperatura. Isso é denominado sinal de controle de ação direta. As Figuras 5.2.12 e 5.2.13 retratam a diferença entre sinais de controle de ação reversa e direta para a mesma ação de válvula.
Em controladores mecânicos (como um controlador pneumático) é usual ser capaz de inverter o sinal de saída do controlador girando o botão de controle proporcional. Assim, a magnitude da banda proporcional e a direção da ação de controle podem ser determinadas a partir do mesmo botão.
Em controladores eletrônicos, ação reversa (RA) ou ação direta (DA) é selecionada através do teclado.
Gain line offset or proportional effect
Offset da linha de ganho ou efeito proporcional
Da explicação do controle proporcional, deve ficar claro que há um offset de controle ou um desvio do valor real em relação ao valor desejado sempre que a carga varia de 50%. To further illustrate this, consider Example 5.2.1 with a 12°C P-band, where an offset of 2°C was expected. If the offset cannot be tolerated by the application, then it must be eliminated. This could be achieved by relocating (or resetting) the set point to a higher value. This provides the same valve opening after manual reset but at a room temperature of 18°C not 16°C.
Manual reset
Reset manual
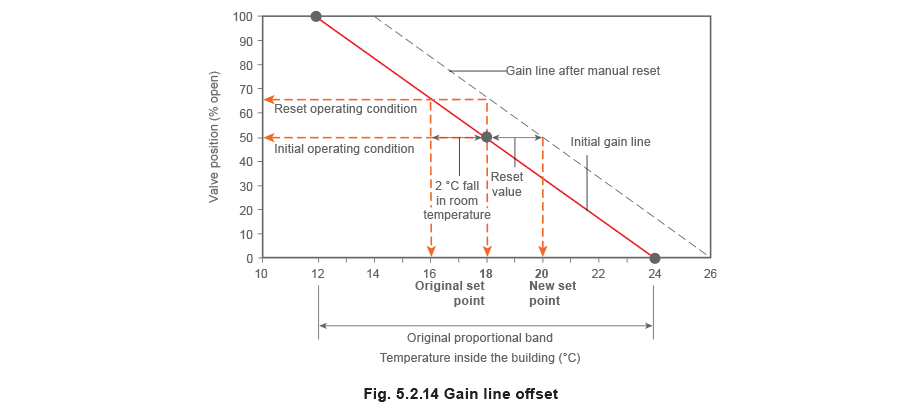
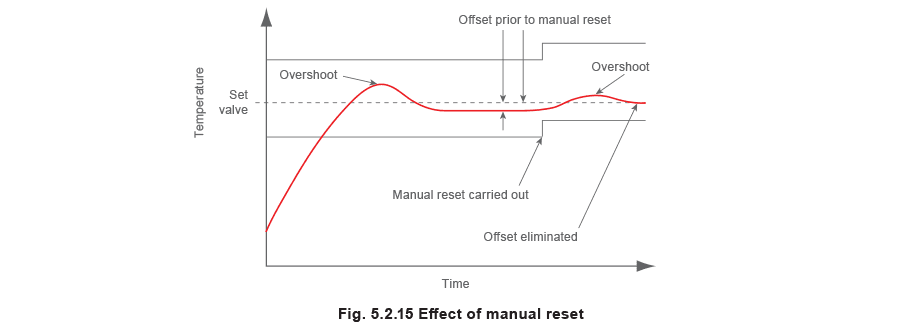
O offset pode ser removido manualmente ou automaticamente. O efeito do reset manual pode ser visto na Figura 5.2.14, e o valor é ajustado manualmente aplicando um offset ao set point de 2°C. Deve ficar claro da Figura 5.2.14 e do texto acima que o efeito é o mesmo que aumentar o valor de ajuste em 2°C. A mesma abertura de válvula de 66,7% agora coincide com a temperatura do cômodo em 18°C. The effects of manual reset are demonstrated in Figure 5.2.15.
Integral control - automatic reset action
Controle integral - ação de reset automático
O ‘reset manual’ é geralmente insatisfatório em plantas de processo onde cada mudança de carga requer uma ação de reset. Também é bastante comum que um operador se confunda com as diferenças entre:
- Valor de ajuste - O que está no dial.
- Valor real - O que o valor do processo é.
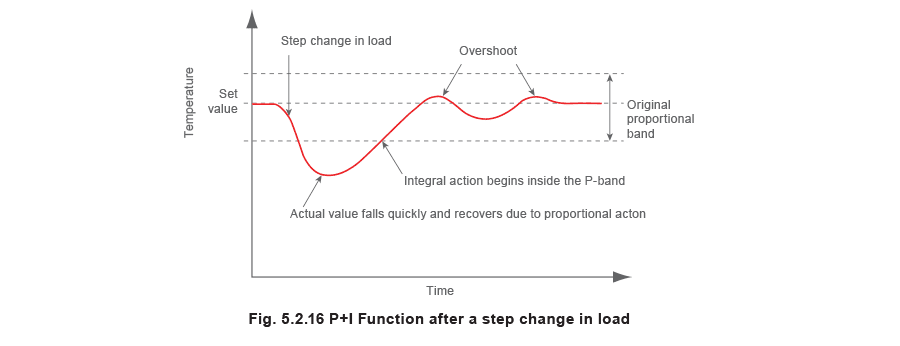
- Valor necessário - A condição perfeita do processo. Tais problemas são superados pela ação de reset contida dentro do mecanismo de um controlador automático. Tal controlador é primariamente um controlador proporcional. Ele então tem uma função de reset adicionada, que é chamada de ‘ação integral’. O reset automático usa uma rotina de integração eletrônica ou pneumática para realizar a função de reset. O termo mais comumente usado para reset automático é ação integral, que é dada a letra I. A função da ação integral é eliminar o offset modificando contínua e automaticamente a saída do controlador de acordo com o desvio de controle integrado ao longo do tempo. O Tempo de Ação Integral (IAT) é definido como o tempo necessário para que a saída do controlador mude devido à ação integral para igualar a mudança de saída devido à ação proporcional. A ação integral dá uma ação corretiva crescente constantemente enquanto um erro continuar existindo. Tal ação corretiva aumentará com o tempo e deve, portanto, em algum momento, ser suficiente para eliminar o erro de regime permanente completamente, desde que tempo suficiente decorra antes que outra mudança ocorra. O controlador permite que o tempo integral seja ajustado para se adequar ao comportamento dinâmico da planta. O controle proporcional mais integral (P + I) torna-se a terminologia para um controlador incorporando essas características. A ação integral em um controlador é frequentemente restrita à banda proporcional. A typical P + I response is shown in Figure 5.2.16, for a step change in load.
The IAT is adjustable within the controller:
- If it is too short, over-reaction and instability will result.
- If it is too long, reset action will be very slow to take effect. IAT is represented in time units. On some controllers the adjustable parameter for the integral action is termed ‘repeats per minute’, which is the number of times per minute that the integral action output changes by the proportional output change.
- Repeats per minute =1/(IAT in minutes)
- IAT = Infinity – Means no integral action
- IAT = 0 – Means infinite integral action It is important to check the controller manual to see how integral action is designated.
Overshoot and 'wind up'
Ultrasshoot e ‘wind up’
Com controladores P + I (e com controladores P), o ultrasshoot é provável de ocorrer quando há atrasos de tempo no sistema. A typical example of this is after a sudden change in load. Consider a process application where a process heat exchanger is designed to maintain water at a fixed temperature. The set point is 80°C, the P-band is set at 5°C (±2.5°C), and the load suddenly changes such that the returning water temperature falls almost instantaneously to 60°C. Figure 5.2.16 shows the effect of this sudden (step change) in load on the actual water temperature. The measured value changes almost instantaneously from a steady 80°C to a value of 60°C. By the nature of the integration process, the generation of integral control action must lag behind the proportional control action, introducing a delay and more dead time to the response. This could have serious consequences in practice, because it means that the initial control response, which in a proportional system would be instantaneous and fast acting, is now subjected to a delay and responds slowly. This may cause the actual value to run out of control and the system to oscillate. These oscillations may increase or decrease depending on the relative values of the controller gain and the integral action. If applying integral action it is important to make sure, that it is necessary and if so, that the correct amount of integral action is applied. Integral control can also aggravate other situations. If the error is large for a long period, for example after a large step change or the system being shut down, the value of the integral can become excessively large and cause overshoot or undershoot that takes a long time to recover. To avoid this problem, which is often called ‘integral wind-up’, sophisticated controllers will inhibit integral action until the system gets fairly close to equilibrium. To remedy these situations it is useful to measure the rate at which the actual temperature is changing; in other words, to measure the rate of change of the signal. Another type of control mode is used to measure how fast the measured value changes, and this is termed Rate Action or Derivative Action.
Derivative control - rate action
Controle derivativo - ação de taxa
Uma ação derivativa (referida pela letra D) mede e responde à taxa de mudança do sinal do processo, e ajusta a saída do controlador para minimizar o ultrasshoot. Se aplicada adequadamente em sistemas com atrasos de tempo, a ação derivativa minimizará o desvio do set point quando houver uma mudança na condição do processo. É interessante notar que a ação derivativa só se aplicará quando houver uma mudança no sinal do processo. Se o valor for estável, qualquer que seja o offset, então a ação derivativa não ocorre. Uma função útil da função derivativa é que o ultrasshoot pode ser minimizado, especialmente em mudanças rápidas de carga. No entanto, a ação derivativa não é fácil de aplicar adequadamente; se não for usada o suficiente, pouco benefício é alcançado, e aplicar demais pode causar mais problemas do que resolve. D action is again adjustable within the controller, and referred to as TD in time units: TD = 0 – Means no D action. TD = Infinity – Means infinite D action. P + D controllers can be obtained, but proportional offset will probably be experienced. It is worth remembering that the main disadvantage with a P control is the presence of offset. To overcome and remove offset, ‘I’ action is introduced. The frequent existence of time lags in the control loop explains the need for the third action D. The result is a P + I + D controller which, if properly tuned, can in most processes give a rapid and stable response, with no offset and without overshoot.
PID controllers
Controladores PID
P, I e D são referidos como ‘termos’ e, portanto, um controlador P + I + D é frequentemente referido como um controlador de três termos.
The various characteristics can be summarised, as shown in Figure 5.2.17.
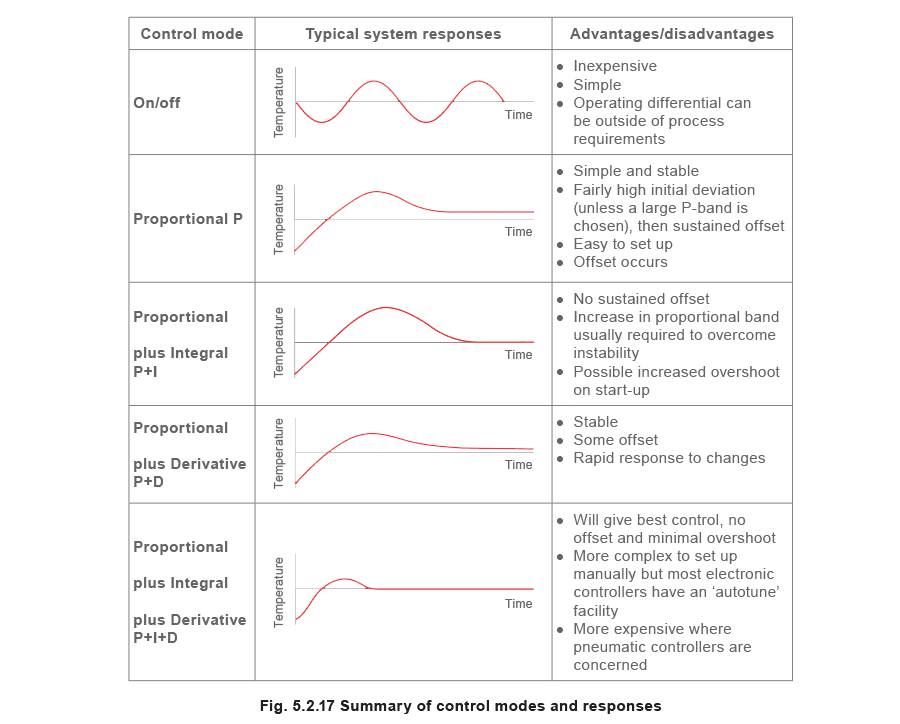
Por fim, o engenheiro de controles deve tentar evitar o perigo de usar controles desnecessariamente complicados para uma aplicação específica. A ação de controle menos complicada que fornecerá o grau de controle necessário deve sempre ser selecionada.
Further terminology
Terminologia adicional
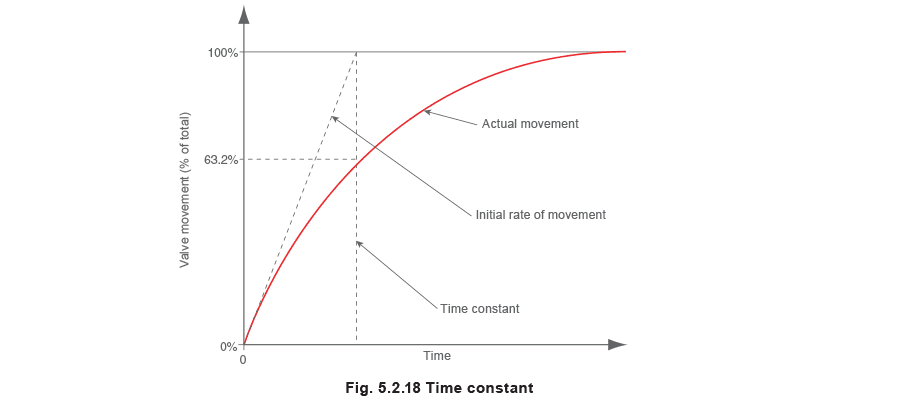
Constante de tempo Isso é definido como: ‘O tempo necessário para que a saída de um controlador mude em 63,2% de seu total devido a uma mudança degrau (ou repentina) na carga do processo’. In reality, the explanation is more involved because the time constant is really the time taken for a signal or output to achieve its final value from its initial value, had the original rate of increase been maintained. This concept is depicted in Figure 5.12.18.
Example 5.2.2 A practical appreciation of the time constant
Exemplo 5.2.2 Uma apreciação prática da constante de tempo
Considere dois tanques de água, tanque A a uma temperatura de 25°C, e tanque B a 75°C. Um sensor é colocado no tanque A e deixado atingir a temperatura de equilíbrio. É então rapidamente transferido para o tanque B. A diferença de temperatura entre os dois tanques é 50°C, e 63,2% dessa faixa de temperatura pode ser calculado como mostrado abaixo: 63,2% de 50°C = 31,6°C A temperatura de referência inicial era 25°C, consequentemente a constante de tempo para este exemplo simples é o tempo necessário para que o sensor atinja 56,6°C, como mostrado abaixo: 25°C + 31,6°C = 56,6°C
Hunting
Oscilação
Frequentemente referida como instabilidade, ciclo ou oscilação. A oscilação produz um desvio em mudança contínua do ponto de operação normal. Isso pode ser causado por:
- A banda proporcional ser muito estreita.
- O tempo integral ser muito curto.
- O tempo derivativo ser muito longo.
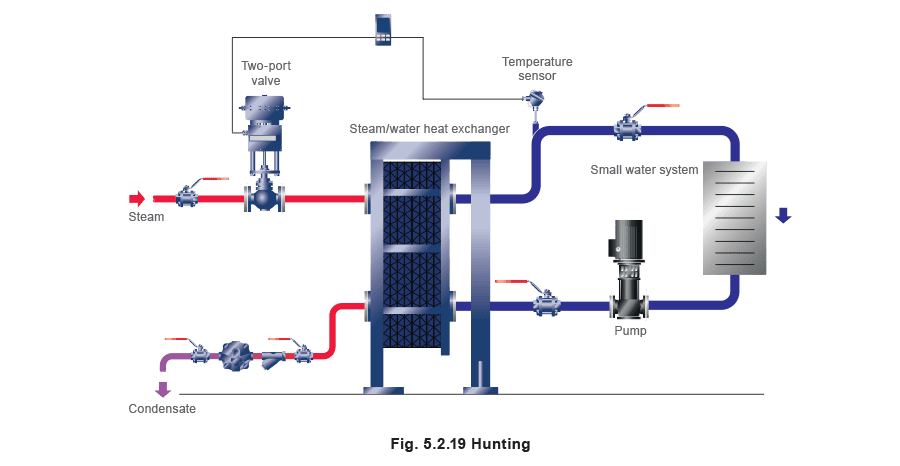
- Uma combinação desses. Constantes de tempo longas ou tempos mortos no sistema de controle ou no próprio processo In Figure 5.2.19 the heat exchanger is oversized for the application. Accurate temperature control will be difficult to achieve and may result in a large proportional band in an attempt to achieve stability. If the system load suddenly increases, the two-port valve will open wider, filling the heat exchanger with high temperature steam. The heat transfer rate increases extremely quickly causing the water system temperature to overshoot. The rapid increase in water temperature is picked up by the sensor and directs the two-port valve to close quickly. This causes the water temperature to fall, and the two-port valve to open again. This cycle is repeated, the cycling only ceasing when the PID terms are adjusted. The following example (Example 5.2.3) gives an idea of the effects of a hunting steam system.
Exemplo 5.2.3 O efeito da oscilação no sistema da Figura 5.2.19
Exemplo 5.2.3 O efeito da oscilação no sistema da Figura 5.2.19
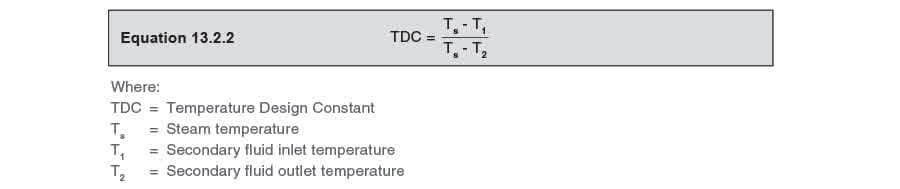
Considere o sistema de trocador de calor vapor-água na Figura 5.2.19. Sob condições de carga mínima, o tamanho do trocador de calor é tal que ele aquece a água secundária de vazão constante de 60°C para 65°C com uma temperatura de vapor de 70°C. O controlador tem um set point de 65°C e uma P-band de 10°C. Considere um aumento súbito na carga secundária, de modo que a temperatura de retorno da água cai quase imediatamente em 40°C. A temperatura da água saindo do trocador de calor também cairá em 40°C para 25°C. O sensor detecta isso e, como essa temperatura está abaixo da P-band, ele direciona a válvula de vapor acionada pneumaticamente a abrir totalmente. A temperatura do vapor é observada subindo de 70°C para 140°C quase instantaneamente. Qual é o efeito na temperatura da água secundária e na estabilidade do sistema de controle? Conforme demonstrado no Módulo 13.2 (A relação entre carga térmica, trocador de calor e carga de vapor), a constante de design de temperatura do trocador de calor, TDC, pode ser calculada a partir das condições operacionais observadas e da Equação 13.2.2:
Neste exemplo, as condições observadas (em carga mínima) são as seguintes:
Quando a temperatura do vapor sobe para 140°C, é possível prever a temperatura de saída a partir da Equação 13.2.5:
A temperatura de saída do trocador de calor é 80°C, que agora está acima da P-band, e o sensor agora sinaliza ao controlador para fechar a válvula de vapor.
A temperatura do vapor cai rapidamente, causando a queda da temperatura de água de saída; e a válvula de vapor abre novamente. O sistema cicla em torno dessas temperaturas até que os parâmetros de controle sejam alterados. Esses sintomas são referidos como ‘oscilação’. A válvula de controle e seu controlador estão em oscilação procurando uma condição estável. Na prática, outros fatores aumentarão a incerteza da situação, como o tamanho do sistema e a reação à mudança de temperatura e a posição do sensor. A oscilação deste tipo pode causar desgaste prematuro dos componentes do sistema, em particular válvulas e atuadores, e dá um controle deficiente. O Exemplo 5.2.3 não é típico de uma aplicação prática. Na realidade, o design correto e o dimensionamento do sistema de controle e do trocador de calor aquecido a vapor não seriam um problema.
Lag
Atraso
O atraso é um atraso na resposta e existirá tanto no sistema de controle quanto no processo ou sistema sob controle. Considere um pequeno cômodo aquecido por um aquecedor, que é controlado por um termostato de espaço do cômodo. Uma grande janela é aberta admitindo grandes quantidades de ar frio. A temperatura do cômodo cairá, mas haverá um atraso enquanto a massa do sensor esfria até a nova temperatura - isso é conhecido como atraso de controle. O tempo de atraso também é referido como tempo morto. Tendo então solicitado mais calor do aquecedor do cômodo, passará algum tempo até que isso tenha efeito e aqueça o cômodo até o ponto onde o termostato está satisfeito. Isso é conhecido como atraso do sistema ou atraso térmico.
Rangeability
Faixa de controle
Isso se relaciona com a válvula de controle e é a razão entre a vazão controlável máxima e a vazão controlável mínima, entre as quais as características da válvula (linear, percentual igual, abertura rápida) serão mantidas. Com a maioria das válvulas de controle, em algum ponto antes que a posição totalmente fechada seja alcançada, não há mais um controle definido sobre a vazão de acordo com as características da válvula. Fabricantes respeitáveis fornecerão figuras de faixa de controle para suas válvulas.
Turndown ratio
Razão de turndown
A razão de turndown é a razão entre a vazão máxima e a vazão controlável mínima. Será substancialmente menor do que a faixa de controle da válvula se a válvula estiver superdimensionada. Embora a definição se relacione apenas com a válvula, é uma função do sistema de controle completo.