Conselhos práticos de instalação e comissionamento para válvulas, atuadores, sensores, controladores e mais.
Válvulas
Válvulas
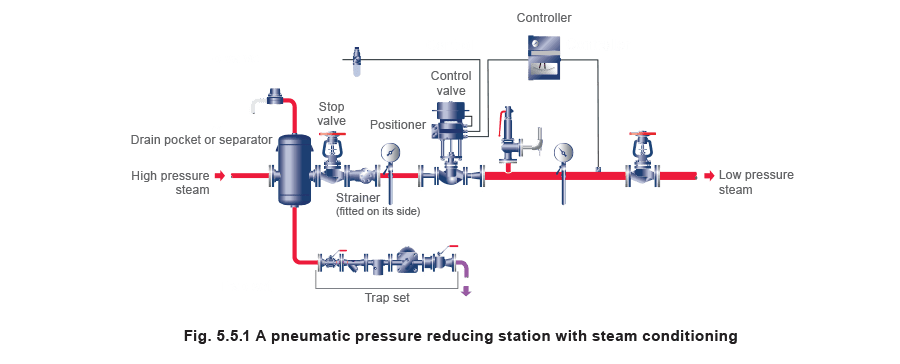
Antes de instalar uma válvula de controle, é necessário garantir que o tamanho, classificação de pressão, materiais e conexões de extremidade sejam todos adequados para as condições sob as quais a válvula deve trabalhar. Todos os fabricantes respeitáveis de equipamentos de controle automático fornecerão instruções detalhadas cobrindo o procedimento correto de instalação para seu equipamento. Dados também serão fornecidos sobre como configurar o equipamento, além de qualquer manutenção rotineira e regular a ser realizada. Na maioria dos casos, o fabricante também oferecerá um serviço de comissionamento no local. Em alguns casos, um contrato de manutenção pós-venda regular pode ser acordado. O Módulo 5.5 aborda os principais pontos a serem considerados antes da instalação. A tubulação a montante e a jusante da válvula de controle deve estar limpa e desobstruída. A operação correta de uma válvula será prejudicada se estiver sujeita a tensões de distorção da linha. É importante garantir que todas as juntas flangeadas sejam quadradas e verdadeiras e que a tubulação seja adequadamente suportada. Válvulas de controle devem geralmente ser instaladas em tubulações horizontais com os eixos verticais. Os sistemas de tubulação serão frequentemente sujeitos a testes de pressão antes do uso. Este teste pode ser realizado a uma pressão acima das condições normais de trabalho. É necessário garantir que a válvula de controle e seus componentes internos sejam projetados para suportar essa pressão de teste mais alta. Válvulas de controle são essencialmente instrumentos e serão danificadas se sujeira ou outros materiais abrasivos ou obstrutivos forem permitidos a entrar nelas. É essencial na maioria das aplicações prevenir isso instalando filtros de tubulação a montante de qualquer válvula de controle. As válvulas também devem ser acessíveis para manutenção rotineira, como reembuchamento de caixas de gaxeta e substituição de componentes internos. Para facilitar esse tipo de trabalho, válvulas de isolamento de padrão de furo completo em ambos os lados da válvula manterão o tempo de inatividade da planta ao mínimo enquanto o trabalho é realizado. Se uma planta deve ser mantida em operação o tempo todo, mesmo quando uma válvula de controle está sendo inspecionada ou mantida, pode ser necessário instalar uma válvula de bypass. No entanto, a válvula usada no bypass deve ser de boa qualidade e deve ser uma válvula de estrangulamento caracterizada ou outra válvula de controle com Kvs correto. Qualquer vazamento através dela durante a operação normal afetará a ação do sistema de controle. Não é recomendado que bypasses manuais sejam instalados em nenhuma circunstância. A válvula de controle deve ser instalada para garantir a direção correta do fluxo do meio que passa pela válvula. Normalmente, uma seta ‘direção do fluxo’ é fundida no corpo da válvula de controle. A válvula deve ter uma capacidade de fluxo adequada e incorrer em uma queda de pressão aceitável. Em linhas de vapor, é importante fornecer um separador de vapor e/ou um ponto de drenagem a montante da válvula, conforme mostrado na Figura 5.5.1. Isso evitará o arraste de condensado através da válvula de controle, o que reduziria sua vida útil. Este ponto de drenagem também é importante se a válvula de controle provavelmente permanecerá fechada por qualquer período de tempo. Se uma drenagem de condensado não for instalada, golpe de hidráulico e danos potencialmente sérios podem resultar quando a válvula abrir. A provisão de um separador de vapor e filtro garante um bom condicionamento do vapor.
Atuadores/sensores
Atuadores/sensores
Novamente, as instruções do fabricante devem ser observadas. Os atuadores são normalmente montados verticalmente acima da válvula de controle, embora diferentes arranjos possam ser recomendados se um atuador elétrico for montado em uma válvula manipulando um meio de alta temperatura, como vapor. Geralmente, os atuadores devem ser localizados longe de condições como excesso de calor, alta umidade ou vapores corrosivos. Esses são propensos a causar falha prematura em componentes como diafragmas ou itens elétricos/eletrônicos. Os fabricantes devem declarar as condições máximas recomendadas de temperatura ambiente para seu equipamento. Com alguns atuadores elétricos, se a condensação for provável dentro do atuador, modelos com aquecimento integrado estão disponíveis. Quando tais condições não podem ser evitadas, atuadores devem ser comprados que sejam adequados às condições instaladas. Invólucros para atuadores, posicionadores, etc., geralmente carregarão uma classificação de invólucro em conformidade com um código elétrico nacional. Isso deve especificar o grau de imunidade da caixa à entrada de poeira e água. É inútil usar um atuador elétrico cujo invólucro tenha uma classificação baixa para a entrada de água, se for provável que seja lavado com mangueira! Cuidado deve ser tomado para garantir que os sensores estejam completamente e corretamente imersos se devem realizar sua função de medição efetivamente. O uso de poços permitirá que a inspeção ou substituição ocorra sem a necessidade de drenar o sistema de tubulação, vaso ou planta de processo. Em contraste, os poços atrasarão os tempos de resposta. O uso de pasta condutora de calor no poço minimizará qualquer atraso na resposta.
Linhas de alimentação e sinal
Linhas de alimentação e sinal
Com um sistema pneumático, o ar comprimido e as linhas de sinal pneumático devem estar secos, livres de óleo e sujeira, e estanques. Localizar o controlador pneumático perto da válvula e do atuador minimizará qualquer atraso devido à capacidade e resistência da linha de sinal. Normalmente, a válvula, o atuador e quaisquer posicionadores ou conversores serão fornecidos como uma unidade completa pré-montada. Se não forem, o atuador precisará ser montado na válvula, e o posicionador (para um controle pneumático) no atuador. A montagem então terá que ser configurada corretamente, para garantir que o curso correto da válvula, etc. seja alcançado, tudo de acordo com as instruções do fabricante.
Fiação elétrica para controles elétricos/eletrônicos e eletropneumáticos
Muitas vezes, muitos ‘problemas de controle’ aparentes são rastreados até fiação incorreta. Para citar um problema óbvio encontrado como exemplo extremo, conectar uma fonte de alimentação de 110 V a um motor classificado para 24 V resultará em danos! Cuidado deve ser tomado com o sistema de fiação, de acordo com as instruções do fabricante, e sujeito a quaisquer regulamentos locais. ‘Ruído’ ou interferência elétrica em sistemas elétricos é frequentemente encontrado, resultando em problemas operacionais difíceis de diagnosticar. O uso de cabo blindado, eletroduto com aterramento separado ou um controlador auto-ajustável ou analógico pode ser necessário. Os cabos devem ser protegidos contra danos mecânicos.
Controladores
Controladores
Conforme mencionado anteriormente, a aplicação geralmente produzirá mudanças que são mais lentas do que o tempo de resposta do sistema de controle. É por isso que os parâmetros do controlador, a banda proporcional ou ganho, tempo integral e tempo derivativo, devem ser ajustados para se adequar a cada aplicação/tarefa específica. Existem vários métodos para ajustar os parâmetros do controlador, a maioria dos quais envolve o uso de matemática. O comportamento de uma malha de controle pode ser previsto matematicamente, mas as características do processo ou aplicação são geralmente determinadas por medição empírica, o que pode ser difícil. Métodos baseados em razões de transferência de calor de projeto podem ser encontrados, mas estão fora do escopo deste Módulo. Antes de definir os parâmetros de controle, é útil revisar cada um dos termos de controle (P, I e D) e as três opções em relação às configurações, por exemplo, muito amplo, muito estreito e correto.
Banda P (Figura 5.5.2)
Banda P (Figura 5.5.2)
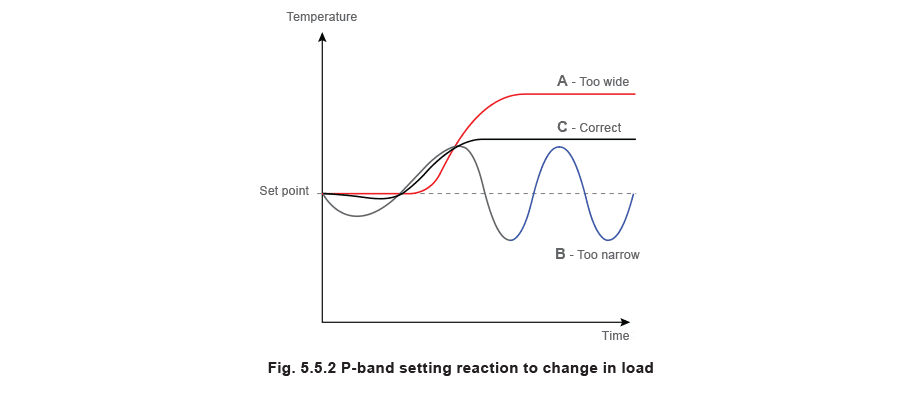
Se a banda P for muito ampla, ocorre grande offset, mas o sistema é muito estável (curva A). Estreitar a banda P reduzirá o offset. Uma banda P muito estreita causará instabilidade e oscilação (curva B). A banda P ótima, curva C, é alcançada em uma configuração ligeiramente mais ampla do que aquela que causa oscilação permanente.
Resumo da banda P (ação proporcional)
Banda P correta = Boa estabilidade, boa resposta Alguns offset
Banda P maior = Melhor estabilidade, resposta mais lenta Maior offset
Banda P menor = Instabilidade, resposta mais rápida Menor offset com oscilação
Ação integral (Figura 5.5.3)
Ação integral (Figura 5.5.3)
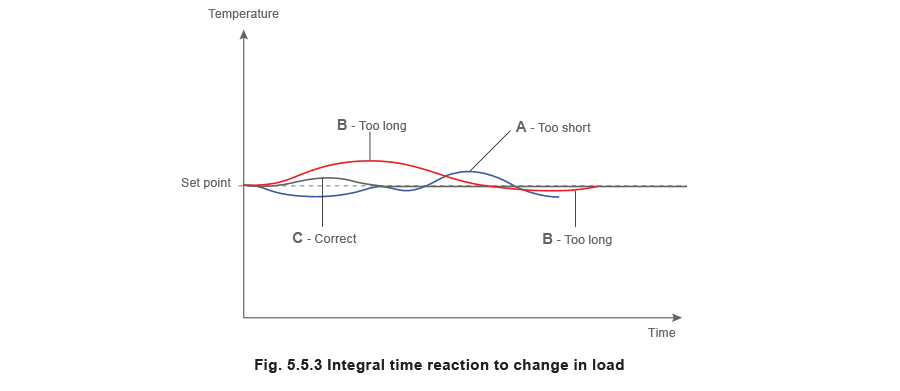
Com um tempo integral muito curto, a temperatura (curva A) cruzará o setpoint e alguma oscilação ocorrerá. Um tempo integral excessivo resultará na temperatura demorando muito para retornar ao setpoint (curva B). A curva C mostra uma configuração correta de tempo integral onde a temperatura retorna ao setpoint o mais rapidamente possível sem qualquer ultrapassagem ou oscilação.
| Resumo da ação integral | ||
| IAT correto = | Eliminação de offset | Estável - sem ultrapassagem |
| IAT muito curto = | Eliminação de offset | Resposta muito rápida, causando instabilidade e ultrapassagem |
| IAT muito longo = | Eliminação de offset | Resposta lenta, estável, sem ultrapassagem |
Ação derivativa (Figura 5.5.4)
Ação derivativa (Figura 5.5.4)
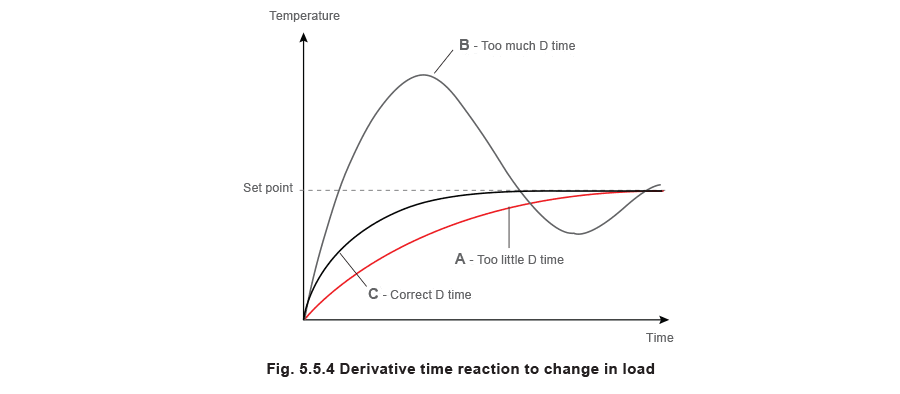
Um tempo derivativo excessivo causará uma mudança muito rápida na temperatura, ultrapassagem e oscilação (curva B). Um tempo derivativo muito curto permite que a temperatura se desvie do setpoint por tempo demais (curva A). A configuração ótima retorna a temperatura ao setpoint o mais rápido possível e é consistente com boa estabilidade (curva C).
| Resumo da ação derivativa | |
| Tempo derivativo correto = | Resposta rápida, estável |
| Muito tempo D = | Resposta mais rápida levando a ultrapassagem e instabilidade |
| Pouco tempo D = | Resposta mais lenta |
Métodos práticos de configuração de um controlador
Métodos práticos de configuração de um controlador
Cada controlador deve ser configurado individualmente para corresponder às características de um sistema específico. Embora existam várias técnicas diferentes pelas quais um controle estável e rápido pode ser alcançado, o método Ziegler-Nicholls provou ser muito eficaz.
O método Ziegler-Nicholls
O método Ziegler-Nicholls
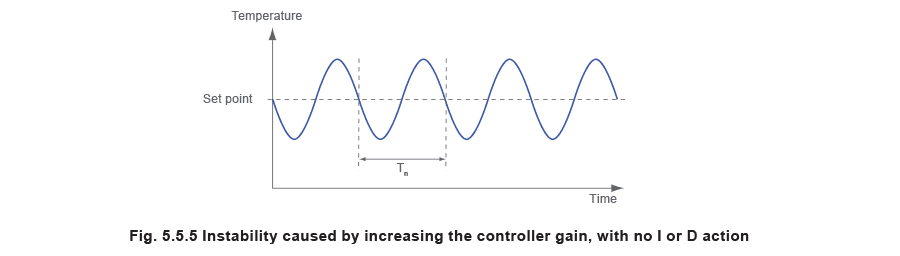
O método de resposta de frequência Ziegler-Nicholls (às vezes chamado de método de oscilação crítica) é muito eficaz para estabelecer configurações do controlador para a carga real. O método usa o controlador como um amplificador para atingir o ponto de instabilidade. Neste ponto, todo o sistema está operando de tal forma que a temperatura está flutuando ao redor do setpoint com amplitude constante (veja Figura 5.5.5). Um pequeno aumento no ganho, ou uma banda proporcional reduzida, tornará o sistema instável, e a válvula de controle começará a oscilar com amplitude crescente. Ao contrário, uma banda proporcional aumentada tornará o processo mais estável e a amplitude será sucessivamente reduzida. No ponto de instabilidade, a característica do sistema é obtida para as condições operacionais reais, incluindo o trocador de calor, válvula de controle, atuador, tubulação e sensor de temperatura. As configurações do controlador podem ser determinadas através do método Ziegler-Nicholls lendo o período de tempo (Tn) dos ciclos de temperatura; e a configuração real da banda proporcional no ponto de instabilidade.
O procedimento para selecionar as configurações para os parâmetros PID, usando o método Ziegler-Nicholls, é o seguinte:
- Remova a ação integral no controlador aumentando o tempo integral (Ti) ao máximo.
- Remova a ação derivativa do controlador configurando o tempo de derivação (TD) para 0.
- Espere até que o processo atinja uma condição estável.
- Reduza a banda proporcional (aumente o ganho) até que o ponto de instabilidade seja alcançado.
- Meça o tempo para um período (Tn) e registre a configuração real da banda P (banda proporcional) no controlador neste ponto.
- Usando essa configuração como ponto de partida, calcule as configurações apropriadas do controlador de acordo com os valores na Figura 5.5.6.
Fig 5.5.6 Cálculo Ziegler-Nicholls
Fig 5.5.6 Cálculo Ziegler-Nicholls
| Banda proporcional | Tempo integral | Tempo derivativo | |
|---|---|---|---|
| Controle P I D | Banda P x 1.7 | Tn/2 | Tn/8 |
| Controle P I | Banda P x 2.2 | Tn/1.2 | |
| Controle P | Banda P x 2.0 |
As configurações do controlador podem ser ajustadas adicionalmente para aumentar a estabilidade ou a resposta. O impacto de alterar a configuração dos parâmetros PID na estabilidade e na resposta do controle é mostrado na Figura 5.5.7.
Fig. 5.5.7 Efeito de alterar configurações PID
Fig. 5.5.7 Efeito de alterar configurações PID
| Estabilidade | Resposta | |
| Aumentar banda P | Aumentada | Mais lenta |
| Aumentar Ti | Aumentada | Mais lenta |
| Aumentar TD | Diminuída | Mais rápida |
Transferência sem perturbação
Transferência sem perturbação
As especificações técnicas dos controladores incluem muitos outros termos e um que é frequentemente encontrado é ‘transferência sem perturbação’ (bumpless transfer). A maioria dos controladores incorpora um interruptor ‘Manual’ – ‘Auto’ e pode haver vezes em que certas situações de controle requerem controle manual. Isso torna a interrupção da malha de controle automática necessária. Sem a transferência sem perturbação, a transferência de Auto para Manual e vice-versa significaria que os níveis de controle seriam perdidos, a menos que a saída manual fosse igualada à saída automática. A transferência sem perturbação garante que as saídas - seja Manual para Auto ou Auto para Manual - coincidam, e é necessário apenas mover o interruptor conforme apropriado.
Controladores auto-ajustáveis
Controladores auto-ajustáveis
Os microprocessadores contemporâneos fornecem a capacidade para algumas funções, que anteriormente requeriam um computador, serem compactadas no espaço confinado de um controlador. Entre estas, estava a capacidade de ‘auto-ajuste’. Controladores que não requerem mais que um engenheiro de comissionamento passe pelo processo de configuração dos termos P I D estão disponíveis há muitos anos. O controlador de auto-ajuste muda para controle liga/desliga por um certo período de tempo. Durante este período, ele analisa os resultados de suas respostas e calcula e configura seus próprios termos P I D. Costumava ser o caso que a função de auto-ajuste só podia se aplicar durante a partida do sistema; uma vez definida pelo controlador, os termos P I D permaneciam constantes, independentemente de quaisquer mudanças posteriores no processo. O controlador moderno agora pode operar o que é chamado de função adaptativa, que não apenas define os termos P I D iniciais necessários, mas monitora e redefine esses termos se necessário, de acordo com mudanças no processo durante condições normais de operação. Tais controladores estão prontamente disponíveis e relativamente baratos. Seu uso está se tornando cada vez mais difundido, mesmo para tarefas de controle relativamente simples.