Tư vấn thực tế về lắp đặt và vận hành thử nghiệm cho van, bộ truyền động, cảm biến, bộ điều khiển và nhiều hơn nữa.
Van
Van
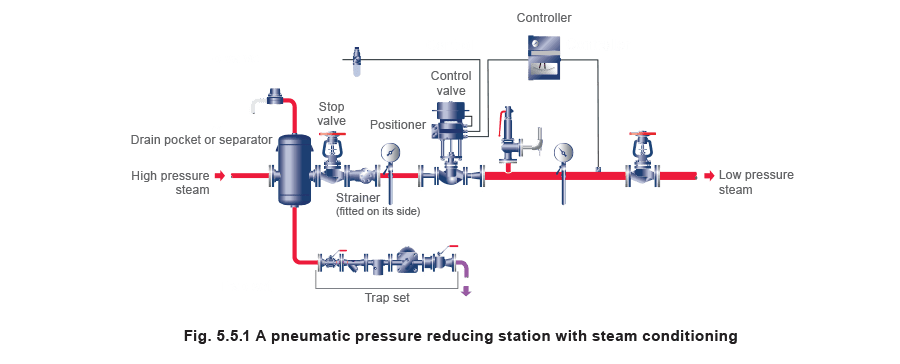
Trước khi lắp đặt van điều khiển, cần đảm bảo rằng kích thước, dải áp suất, vật liệu và kết nối đầu đều phù hợp với điều kiện mà van dự kiến hoạt động. Tất cả các nhà sản xuất uy tín thiết bị điều khiển tự động sẽ cung cấp hướng dẫn chi tiết về quy trình lắp đặt đúng cho thiết bị của họ. Dữ liệu cũng sẽ được cung cấp về cách thiết lập thiết bị, cùng với bất kỳ bảo dưỡng định kỳ và thường xuyên nào cần thực hiện. Trong hầu hết các trường hợp, nhà sản xuất cũng sẽ cung cấp dịch vụ vận hành thử nghiệm tại chỗ. Trong một số trường hợp, hợp đồng bảo dưỡng hậu mãi định kỳ có thể được thỏa thuận. Chương 5.5 đề cập đến các điểm chính cần xem xét trước khi lắp đặt. Ống dẫn thượng lưu và hạ lưu của van điều khiển phải thông thoáng và không bị cản trở. Hoạt động đúng của van sẽ bị ảnh hưởng nếu van chịu ứng suất biến dạng đường ống. Điều quan trọng là đảm bảo rằng tất cả các mối nối mặt bích đều vuông và đúng vị trí và ống dẫn được đỡ đầy đủ. Van điều khiển nói chung nên được lắp đặt trong đường ống ngang với trục đứng. Hệ thống ống dẫn thường sẽ phải chịu thử nghiệm áp suất trước khi sử dụng. Thử nghiệm này có thể được thực hiện ở áp suất cao hơn điều kiện làm việc bình thường. Cần đảm bảo rằng van điều khiển và các bộ phận bên trong được thiết kế để chịu được áp suất thử nghiệm cao hơn này. Về bản chất, van điều khiển là các thiết bị và sẽ bị hư hỏng nếu bụi bẩn hoặc các vật liệu mài mòn hoặc cản trở khác được phép đi vào chúng. Trong hầu hết các ứng dụng, điều cần thiết là ngăn chặn điều này bằng cách lắp bộ lọc đường ống thượng lưu của bất kỳ van điều khiển nào. Van cũng phải dễ tiếp cận để bảo dưỡng định kỳ, như thay thế đệm và thay thế các bộ phận bên trong. Để tạo điều kiện cho loại công việc này, van cô lập loại toàn lỗ ở hai bên van sẽ giúp thời gian ngừng hoạt động của nhà máy ở mức tối thiểu trong khi công việc được thực hiện. Nếu nhà máy phải hoạt động liên tục, ngay cả khi van điều khiển đang được kiểm tra hoặc bảo dưỡng, có thể cần lắp van bypass có van. Tuy nhiên, van được sử dụng trong bypass phải có chất lượng tốt và nên là van tiết lưu có đặc tính hoặc một van điều khiển khác có Kvs chính xác. Bất kỳ rò rỉ nào qua van trong quá trình hoạt động bình thường sẽ ảnh hưởng đến hành động của hệ thống điều khiển. Không khuyến nghị lắp van bypass thủ công trong bất kỳ trường hợp nào. Van điều khiển phải được lắp đặt để đảm bảo hướng dòng chảy đúng của môi chất đi qua van. Thông thường, mũi tên ‘hướng dòng chảy’ được đúc vào thân van điều khiển. Van phải có lưu lượng phù hợp và chịu tổn thất áp suất chấp nhận được. Trong các đường hơi, điều quan trọng là phải cung cấp bộ tách hơi và/ hoặc điểm thoát ngưng thượng lưu của van, như trong Hình 5.5.1. Điều này sẽ ngăn ngưng tụ đi qua van điều khiển, nếu không sẽ làm giảm tuổi thọ của van. Điểm thoát này cũng quan trọng nếu van điều khiển có thể đóng trong thời gian dài. Nếu không lắp đặt điểm thoát ngưng, búa nước và hư hỏng nghiêm trọng có thể xảy ra khi van mở. Việc cung cấp bộ tách hơi và bộ lọc đảm bảo điều kiện hơi tốt.
Bộ truyền động/cảm biến
Bộ truyền động/cảm biến
Một lần nữa, hướng dẫn của nhà sản xuất phải được tuân thủ. Bộ truyền động thường được gắn theo chiều dọc phía trên van điều khiển, mặc dù các sắp xếp khác có thể được khuyến nghị nếu bộ truyền động điện được gắn vào van xử lý môi chất nhiệt độ cao, chẳng hạn như hơi nước. Nói chung, bộ truyền động nên được đặt xa các điều kiện như nhiệt độ quá cao, độ ẩm cao hoặc hơi ăn mòn. Những điều này có thể gây ra hỏng hóc sớm ở các thành phần như màng ngăn hoặc các bộ phận điện/tử. Nhà sản xuất nên nêu rõ điều kiện nhiệt độ môi trường tối đa khuyến nghị cho thiết bị của họ. Với một số bộ truyền động điện, nếu ngưng tụ có thể xảy ra trong bộ truyền động, các mẫu có bộ sưởi tích hợp có sẵn. Khi các điều kiện này không thể tránh được, nên mua các bộ truyền động phù hợp với điều kiện lắp đặt. Vỏ bọc cho bộ truyền động, bộ định vị, v.v., thường sẽ mang xếp hạng vỏ bọc phù hợp với quy tắc điện quốc gia. Điều này nên chỉ định mức độ chống bụi và nước xâm nhập của hộp. Thật vô nghĩa khi sử dụng bộ truyền động điện có vỏ bọc có xếp hạng thấp chống nước xâm nhập, nếu nó có thể bị xịt nước! Phải cẩn thận để đảm bảo rằng cảm biến được ngâm hoàn toàn và chính xác nếu chúng thực hiện chức năng cảm biến một cách hiệu quả. Việc sử dụng ống bảo hộ sẽ cho phép kiểm tra hoặc thay thế mà không cần phải xả hệ thống ống, bình hoặc nhà máy quy trình. Ngược lại, ống bảo hộ sẽ làm chậm thời gian phản hồi. Việc sử dụng keo dẫn nhiệt trong ống bảo hộ sẽ giảm thiểu bất kỳ sự chậm trễ nào trong phản hồi.
Đường nguồn và tín hiệu
Đường nguồn và tín hiệu
Với hệ thống khí nén, khí nén và đường tín hiệu khí nén phải khô, không có dầu và bụi bẩn, và kín. Việc đặt bộ điều khiển khí nén gần van và bộ truyền động sẽ giảm thiểu bất kỳ độ trễ nào do dung tích và kháng trở của đường tín hiệu. Thông thường, van, bộ truyền động và bất kỳ bộ định vị hoặc bộ chuyển đổi nào, sẽ được cung cấp như một đơn vị lắp ráp hoàn chỉnh. Nếu không, bộ truyền động sẽ cần được gắn vào van, và bộ định vị (cho điều khiển khí nén) vào bộ truyền động. Sau đó, cụm lắp ráp sẽ phải được thiết lập đúng cách, để đảm bảo rằng hành trình van chính xác, v.v. được đạt được, tất cả theo hướng dẫn của nhà sản xuất.
Đấu nối điện cho điều khiển điện/tử và điện khí nén
Quá thường xuyên, nhiều vấn đề ‘điều khiển’ rõ ràng được truy nguyên từ đấu nối sai. Để trích dẫn một vấn đề rõ ràng gặp phải như một ví dụ cực đoan, kết nối nguồn 110 V vào động cơ định mức 24 V, sẽ dẫn đến hư hỏng! Phải cẩn thận với hệ thống đấu nối, theo hướng dẫn của nhà sản xuất, và tuân theo bất kỳ quy định địa phương nào. ‘Nhiễu’ hoặc nhiễu điện trong hệ thống điện thường gặp phải, dẫn đến các vấn đề hoạt động khó chẩn đoán. Việc sử dụng cáp có vỏ bọc, conduit nối đất riêng biệt hoặc bộ điều khiển tự hành hoặc tương tự có thể cần thiết. Cáp phải được bảo vệ khỏi hư hỏng cơ học.
Bộ điều khiển
Bộ điều khiển
Như đã đề cập trước đó, ứng dụng thường sẽ tạo ra các thay đổi chậm hơn thời gian phản hồi của hệ thống điều khiển. Đây là lý do tại sao các tham số của bộ điều khiển, dải tỷ lệ hoặc độ khuếch đại, thời gian tích phân và thời gian vi phân, phải được tinh chỉnh để phù hợp với từng ứng dụng/công việc cụ thể. Có một số phương pháp để điều chỉnh tham số bộ điều khiển, hầu hết trong số đó liên quan đến việc sử dụng toán học. Hành vi của vòng lặp điều khiển có thể được dự đoán bằng toán học nhưng đặc tính quá trình hoặc ứng dụng thường được xác định bằng phép đo thực nghiệm, điều này có thể khó khăn. Các phương pháp dựa trên tỷ lệ truyền nhiệt thiết kế có thể được tìm thấy, nhưng chúng nằm ngoài phạm vi của chương này. Trước khi thiết lập các tham số điều khiển, nên xem xét từng thuật ngữ điều khiển (P, I và D), và ba tùy chọn liên quan đến cài đặt, ví dụ, quá rộng, quá hẹp, và chính xác.
Dải P (Hình 5.5.2)
Dải P (Hình 5.5.2)
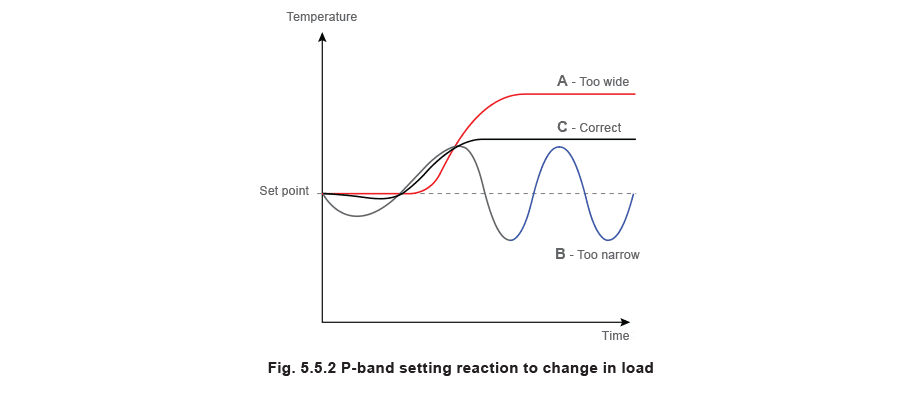
Nếu dải P quá rộng, độ lệch lớn xảy ra nhưng hệ thống rất ổn định (đường cong A). Thu hẹp dải P sẽ giảm độ lệch. Dải P quá hẹp sẽ gây mất ổn định và dao động, (đường cong B). Dải P tối ưu, đường cong C, đạt được ở cài đặt chỉ hơi rộng hơn so với mức gây ra dao động vĩnh viễn.
Tóm tắt về dải P (hành động tỷ lệ)
Dải P chính xác = Ổn định tốt, phản hồi tốt Có một số độ lệch
Dải P lớn hơn = Ổn định hơn, phản hồi chậm hơn Độ lệch lớn hơn
Dải P nhỏ hơn = Mất ổn định, phản hồi nhanh hơn Độ lệch nhỏ hơn với dao động
Hành động tích phân (Hình 5.5.3)
Hành động tích phân (Hình 5.5.3)
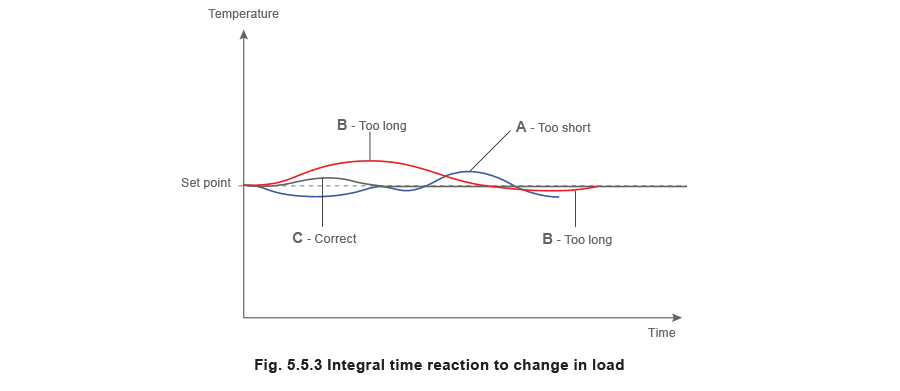
Với thời gian tích phân quá ngắn, nhiệt độ (đường cong A) sẽ vượt qua điểm đặt và một số dao động sẽ xảy ra. Thời gian tích phân quá dài sẽ khiến nhiệt độ mất quá nhiều thời gian để trở về điểm đặt (đường cong B). Đường cong C cho thấy cài đặt thời gian tích phân chính xác nơi nhiệt độ trở về điểm đặt nhanh nhất có thể mà không có bất kỳ overshoot hoặc dao động nào.
| Tóm tắt hành động tích phân | ||
| IAT chính xác = | Loại bỏ độ lệch | Ổn định - không overshoot |
| IAT quá ngắn = | Loại bỏ độ lệch | Phản hồi quá nhanh, gây mất ổn định và overshoot |
| IAT quá dài = | Loại bỏ độ lệch | Phản hồi chậm, ổn định, không overshoot |
Hành động vi phân (Hình 5.5.4)
Hành động vi phân (Hình 5.5.4)
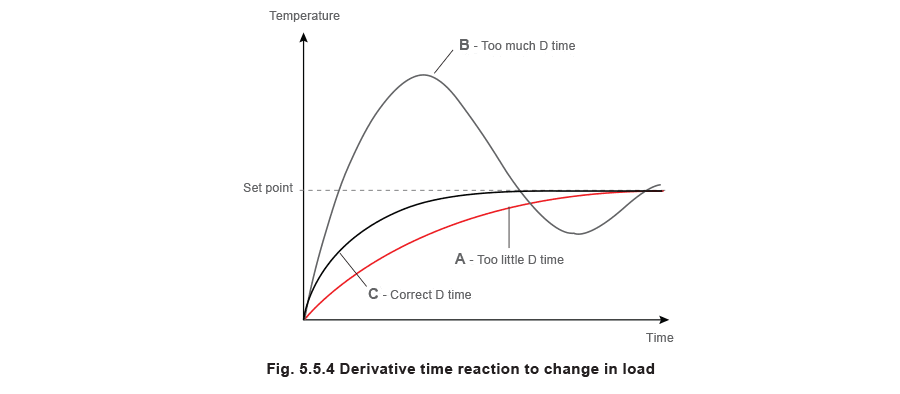
Thời gian vi phân quá lớn sẽ gây ra thay đổi quá nhanh về nhiệt độ, overshoot và dao động (đường cong B). Thời gian vi phân quá ngắn cho phép nhiệt độ lệch khỏi điểm đặt quá lâu (đường cong A). Cài đặt tối ưu đưa nhiệt độ trở về điểm đặt nhanh nhất có thể và nhất quán với sự ổn định tốt (đường cong C).
| Tóm tắt hành động vi phân | |
| Thời gian vi phân chính xác = | Phản hồi nhanh, ổn định |
| Quá nhiều thời gian D = | Phản hồi nhanh hơn dẫn đến overshoot và mất ổn định |
| Quá ít thời gian D = | Phản hồi chậm hơn |
Phương pháp thực tế để thiết lập bộ điều khiển
Phương pháp thực tế để thiết lập bộ điều khiển
Mỗi bộ điều khiển phải được thiết lập riêng lẻ để phù hợp với đặc tính của hệ thống cụ thể. Mặc dù có nhiều kỹ thuật khác nhau để đạt được điều khiển ổn định và nhanh, phương pháp Ziegler-Nicholls đã chứng minh là rất hiệu quả.
Phương pháp Ziegler-Nicholls
Phương pháp Ziegler-Nicholls
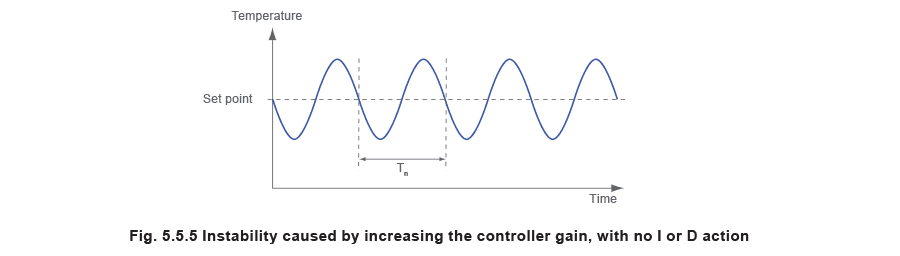
Phương pháp tần số đáp ứng Ziegler-Nicholls (đôi khi được gọi là phương pháp dao động tới hạn) rất hiệu quả trong việc thiết lập cài đặt bộ điều khiển cho tải thực tế. Phương pháp sử dụng bộ điều khiển như bộ khuếch đại để đạt đến điểm mất ổn định. Tại thời điểm này toàn bộ hệ thống hoạt động theo cách mà nhiệt độ dao động xung quanh điểm đặt với biên độ không đổi, (xem Hình 5.5.5). Một sự tăng nhỏ về độ khuếch đại, hoặc giảm dải tỷ lệ, sẽ làm hệ thống mất ổn định, và van điều khiển sẽ bắt đầu săn tìm với biên độ tăng dần. Ngược lại, tăng dải tỷ lệ sẽ làm quá trình ổn định hơn và biên độ sẽ giảm liên tục. Tại điểm mất ổn định, đặc tính hệ thống được thu được cho các điều kiện hoạt động thực tế, bao gồm bộ trao đổi nhiệt, van điều khiển, bộ truyền động, đường ống, và cảm biến nhiệt độ. Cài đặt bộ điều khiển có thể được xác định thông qua phương pháp Ziegler-Nicholls bằng cách đọc chu kỳ thời gian (Tn) của các chu kỳ nhiệt độ; và cài đặt dải tỷ lệ thực tế tại điểm mất ổn định.
Quy trình chọn cài đặt cho tham số PID, sử dụng phương pháp Ziegler-Nicholls, như sau:
- Loại bỏ hành động tích phân trên bộ điều khiển bằng cách tăng thời gian tích phân (Ti) lên tối đa.
- Loại bỏ hành động vi phân của bộ điều khiển bằng cách đặt thời gian vi phân (TD) thành 0.
- Chờ cho đến khi quá trình đạt điều kiện ổn định.
- Giảm dải tỷ lệ (tăng độ khuếch đại) cho đến khi đạt đến điểm mất ổn định.
- Đo thời gian cho một chu kỳ (Tn) và ghi lại cài đặt dải P (dải tỷ lệ) thực tế trên bộ điều khiển tại thời điểm này.
- Sử dụng cài đặt này làm điểm bắt đầu, tính toán cài đặt bộ điều khiển phù hợp theo giá trị trong Hình 5.5.6.
Hình 5.5.6 Tính toán Ziegler-Nicholls
Hình 5.5.6 Tính toán Ziegler-Nicholls
| Dải tỷ lệ | Thời gian tích phân | Thời gian vi phân | |
|---|---|---|---|
| Điều khiển P I D | Dải P x 1.7 | Tn/2 | Tn/8 |
| Điều khiển P I | Dải P x 2.2 | Tn/1.2 | |
| Điều khiển P | Dải P x 2.0 |
Cài đặt bộ điều khiển có thể được điều chỉnh thêm để tăng độ ổn định hoặc phản hồi. Tác động của việc thay đổi cài đặt tham số PID đối với độ ổn định, và phản hồi của điều khiển, được thể hiện trong Hình 5.5.7.
Hình 5.5.7 Ảnh hưởng của việc thay đổi cài đặt PID
Hình 5.5.7 Ảnh hưởng của việc thay đổi cài đặt PID
| Độ ổn định | Phản hồi | |
| Tăng dải P | Tăng | Chậm hơn |
| Tăng Ti | Tăng | Chậm hơn |
| Tăng TD | Giảm | Nhanh hơn |
Chuyển đổi không giật
Chuyển đổi không giật
Các thông số kỹ thuật cho bộ điều khiển bao gồm nhiều thuật ngữ khác và một thuật ngữ thường xuyên gặp là ‘chuyển đổi không giật’. Hầu hết các bộ điều khiển tích hợp công tắc ‘Thủ công’ - ‘Tự động’ và có thể có những lúc một số tình huống điều khiển yêu cầu điều khiển thủ công. Điều này làm cho việc ngắt vòng lặp điều khiển tự động trở nên cần thiết. Nếu không có chuyển đổi không giật, việc chuyển từ Tự động sang Thủ công và ngược lại sẽ có nghĩa là mức điều khiển bị mất,trừ khi đầu ra thủ công được khớp với đầu ra tự động. Chuyển đổi không giật đảm bảo rằng các đầu ra - dù từ Thủ công sang Tự động hay Tự động sang Thủ công - khớp nhau, và chỉ cần di chuyển công tắc như phù hợp.
Bộ điều khiển tự tinh chỉnh
Bộ điều khiển tự tinh chỉnh
Các bộ vi xử lý hiện đại cung cấp khả năng cho một số chức năng, trước đây yêu cầu máy tính, được đóng gói trong không gian hạn chế của bộ điều khiển. Trong số đó, có khả năng ‘tự tinh chỉnh’. Các bộ điều khiển không còn yêu cầu kỹ sư vận hành thử nghiệm thực hiện quá trình thiết lập các thuật ngữ P I D đã có sẵn từ nhiều năm. Bộ điều khiển tự tinh chỉnh chuyển sang điều khiển bật/tắt trong một khoảng thời gian nhất định. Trong thời gian này, nó phân tích kết quả phản hồi, và tính toán và thiết lập các thuật ngữ P I D của riêng nó. Trước đây, hàm tự tinh chỉnh chỉ có thể áp dụng trong quá trình khởi động hệ thống; một khi được thiết lập bởi bộ điều khiển, các thuật ngữ P I D không thay đổi, bất kể bất kỳ thay đổi nào sau đó trong quá trình. Bộ điều khiển hiện đại bây giờ có thể vận hành chức năng thích ứng được gọi là, không chỉ thiết lập các thuật ngữ P I D ban đầu cần thiết, mà còn giám sát và thiết lập lại các thuật ngữ này nếu cần, theo những thay đổi trong quá trình trong điều kiện hoạt động bình thường. Các bộ điều khiển như vậy có sẵn dễ dàng và tương đối rẻ tiền. Việc sử dụng của chúng ngày càng trở nên phổ biến, ngay cả cho các nhiệm vụ điều khiển tương đối đơn giản.