Lý Thuyết Điều Khiển Cơ Bản
Bài hướng dẫn này xem xét các chế độ điều khiển bật/tắt và liên tục.
Nó giới thiệu các hành động điều khiển tỷ lệ, tích phân và đạo hàm, đồng thời giải thích một số thuật ngữ chuyên ngành.
Các chế độ điều khiển
Các chế độ điều khiển
Một hệ thống điều khiển nhiệt độ tự động có thể bao gồm van, bộ truyền động, bộ điều khiển và cảm biến phát hiện nhiệt độ không gian trong phòng. Hệ thống điều khiển được cho là ‘cân bằng’ khi cảm biến nhiệt độ không gian không ghi nhận nhiệt độ nhiều hơn hoặc ít hơn so với yêu cầu của hệ thống điều khiển. Điều gì xảy ra với van điều khiển khi cảm biến không gian ghi nhận sự thay đổi nhiệt độ (sai lệch nhiệt độ) phụ thuộc vào loại hệ thống điều khiển được sử dụng. Mối quan hệ giữa chuyển động của van và sự thay đổi nhiệt độ trong môi chất được điều khiển được gọi là chế độ điều khiển hoặc hành động điều khiển.
Có nhiều biến thể của cả hai chế độ này, sẽ được xem xét chi tiết hơn.
Điều khiển bật/tắt Đôi khi được gọi là điều khiển hai bước hoặc hai vị trí, đây là chế độ điều khiển cơ bản nhất.
Xét bể nước trong Hình 5.2.1, mục tiêu là đun nóng nước trong bể bằng năng lượng tỏa ra từ cuộn hơi đơn giản. Trong đường ống dẫn đến cuộn, van hai cổng và bộ truyền động được lắp đặt, cùng với bộ điều nhiệt, đặt trong nước trong bể.
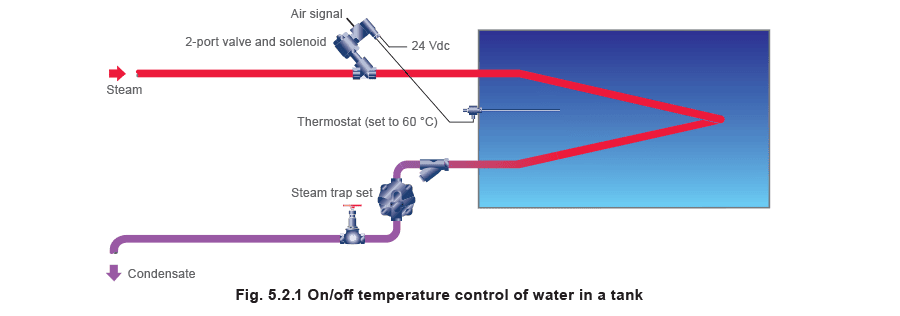
Bộ điều nhiệt được đặt ở 60°C, là nhiệt độ yêu cầu của nước trong bể. Logic cho thấy nếu điểm chuyển mạch thực sự ở 60°C, hệ thống sẽ không bao giờ hoạt động đúng, vì van sẽ không biết nên mở hay đóng ở 60°C. Sau đó nó có thể mở và đóng nhanh chóng, gây mài mòn.
Vì lý do này, bộ điều nhiệt sẽ có điểm chuyển mạch trên và dưới. Điều này cần thiết để ngăn ngừa quá trình lặp lại quá nhanh. Trong trường hợp này, điểm chuyển mạch trên có thể là 61°C (điểm mà bộ điều nhiệt bảo van đóng) và điểm chuyển mạch dưới có thể là 59°C (điểm mà van được bảo mở). Do đó có sự khác biệt chuyển mạch tích hợp trong bộ điều nhiệt là ±1°C quanh điểm đặt 60°C. 2°C (±1°C) này được gọi là sai phân chuyển mạch. (Điều này sẽ khác nhau giữa các bộ điều nhiệt). Biểu đồ hành động chuyển mạch của bộ điều nhiệt sẽ trông như đồ thị trong Hình 5.2.2. Nhiệt độ của nước trong bể sẽ giảm xuống 59°C trước khi van được yêu cầu mở và sẽ tăng lên 61°C trước khi van được chỉ thị đóng.
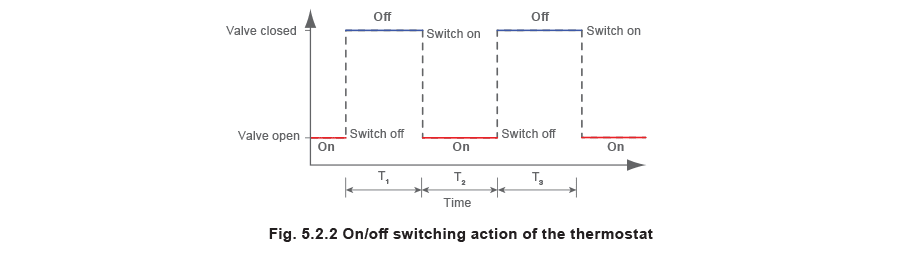
Hình 5.2.2 cho thấy các đường chuyển mạch thẳng nhưng hiệu ứng truyền nhiệt từ cuộn sang nước sẽ không tức thì. Sẽ mất thời gian để hơi nước trong cuộn ảnh hưởng đến nhiệt độ nước trong bể. Không chỉ vậy, nước trong bể sẽ tăng trên giới hạn trên 61°C và giảm dưới giới hạn dưới 59°C. Điều này có thể được giải thích bằng cách tham chiếu chéo Hình 5.2.2 và 5.2.3. Tuy nhiên trước tiên cần mô tả những gì đang xảy ra.
Tại điểm A (59°C, Hình 5.2.3) bộ điều nhiệt bật, chỉ thị van mở rộng. Mất thời gian để truyền nhiệt từ cuộn ảnh hưởng đến nhiệt độ nước, như thể hiện bởi đồ thị nhiệt độ nước trong Hình 5.2.3. Tại điểm B (61°C) bộ điều nhiệt tắt và cho phép van đóng. Tuy nhiên cuộn vẫn đầy hơi nước, tiếp tục ngưng tụ và tỏa nhiệt. Do đó nhiệt độ nước tiếp tục tăng trên nhiệt độ chuyển mạch trên, và ‘vượt quá’ tại C, trước khi cuối cùng giảm.
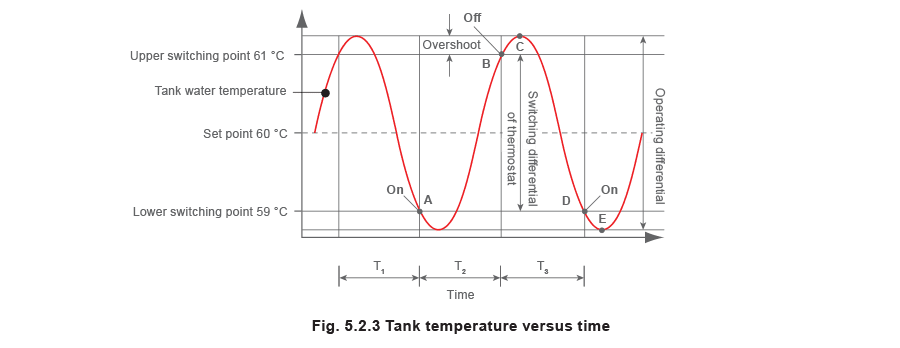
Từ điểm này trở đi, nhiệt độ nước trong bể tiếp tục giảm cho đến khi, tại điểm D (59°C), bộ điều nhiệt bảo van mở. Hơi nước được đưa vào qua cuộn nhưng lại mất thời gian để có hiệu ứng và nhiệt độ nước tiếp tục giảm trong một lúc, đạt mức thấp nhất tại điểm E.
Sự khác biệt giữa đỉnh và đáy được gọi là sai phân vận hành. Sai phân chuyển mạch của bộ điều nhiệt phụ thuộc vào loại bộ điều nhiệt được sử dụng. Sai phân vận hành phụ thuộc vào đặc tính của ứng dụng như bể, nước trong bể, đặc tính truyền nhiệt của cuộn, tốc độ truyền nhiệt đến bộ điều nhiệt, v.v. Về cơ bản, với điều khiển bật/tắt, có giới hạn chuyển mạch trên và dưới, và van hoàn toàn mở hoặc hoàn toàn đóng - không có trạng thái trung gian. Tuy nhiên, có các bộ điều khiển cung cấp điều khiển thời gian tỷ lệ, trong đó có thể thay đổi tỷ lệ thời gian ‘bật’ so với thời gian ‘tắt’ để kiểm soát điều kiện được điều khiển. Hành động tỷ lệ này xảy ra trong băng thông đã chọn quanh điểm đặt; điểm đặt là điểm giữa băng thông. Nếu điều kiện được điều khiển nằm ngoài băng thông, tín hiệu đầu ra từ bộ điều khiển hoàn toàn bật hoặc hoàn toàn tắt, hoạt động như thiết bị bật/tắt. Nếu điều kiện được điều khiển nằm trong băng thông, đầu ra bộ điều khiển được bật và tắt tương ứng với độ lệch giữa giá trị điều kiện được điều khiển và điểm đặt. Khi điều kiện được điều khiển tại điểm đặt, tỷ lệ thời gian ‘bật’ so với thời gian ‘tắt’ là 1:1, tức là thời gian ‘bật’ bằng thời gian ‘tắt’. Nếu điều kiện được điều khiển dưới điểm đặt, thời gian ‘bật’ sẽ dài hơn thời gian ‘tắt’, trong khi nếu trên điểm đặt, thời gian ‘tắt’ sẽ dài hơn, tương ứng với độ lệch trong băng thông. Ưu điểm chính của điều khiển bật/tắt là đơn giản và chi phí rất thấp. Đó là lý do nó thường được tìm thấy trong các ứng dụng gia dụng như lò hơi sưởi trung tâm và quạt sưởi. Nhược điểm chính là sai phân vận hành có thể nằm ngoài dung sai điều khiển yêu cầu bởi quy trình. Ví dụ, trên dây chuyền sản xuất thực phẩm, nơi hương vị và tính lặp lại của hương vị được xác định bởi điều khiển nhiệt độ chính xác, điều khiển bật/tắt có thể không phù hợp. Ngược lại, trong trường hợp sưởi ấm không gian thường có dung tích trữ lớn (diện tích lớn để sưởi hoặc làm mát sẽ phản ứng chậm với thay đổi nhiệt độ) và biến đổi nhỏ trong giá trị mong muốn là chấp nhận được. Trong nhiều trường hợp, điều khiển bật/tắt hoàn toàn phù hợp cho loại ứng dụng này. Nếu điều khiển bật/tắt không phù hợp vì cần điều khiển nhiệt độ chính xác hơn, tùy chọn tiếp theo là điều khiển liên tục.
Điều khiển liên tục
Điều khiển liên tục
Điều khiển liên tục thường được gọi là điều khiển điều biến. Điều này có nghĩa là van có khả năng di chuyển liên tục để thay đổi mức độ mở hoặc đóng van. Nó không chỉ di chuyển đến hoàn toàn mở hoặc hoàn toàn đóng, như với điều khiển bật/tắt. Có ba hành động điều khiển cơ bản thường được áp dụng cho điều khiển liên tục:
Cũng cần xem xét các hành động này kết hợp với nhau như P + I, P + D, P + I + D. Mặc dù có thể kết hợp các hành động khác nhau, và tất cả đều giúp tạo ra phản ứng mong muốn, điều quan trọng cần nhớ là cả hành động tích phân và đạo hàm thường là các chức năng điều chỉnh của hành động điều khiển tỷ lệ cơ bản.
Ba hành động điều khiển được xem xét dưới đây.
Điều khiển tỷ lệ
Điều khiển tỷ lệ
Đây là chế độ điều khiển liên tục cơ bản nhất và thường được ký hiệu bằng chữ cái ‘P’. Mục tiêu chính của điều khiển tỷ lệ là kiểm soát quy trình khi các điều kiện thay đổi. Phần này cho thấy rằng:
- Băng thông tỷ lệ càng rộng, điều khiển càng ổn định, nhưng độ lệch càng lớn.
- Băng thông tỷ lệ càng hẹp, quy trình càng kém ổn định, nhưng độ lệch càng nhỏ.
- Do đó, mục tiêu nên là giới thiệu băng thông tỷ lệ chấp nhận được nhỏ nhất mà luôn giữ quy trình ổn định với độ lệch tối thiểu. Khi giải thích điều khiển tỷ lệ, một số thuật ngữ mới phải được giới thiệu. Để định nghĩa những thuật ngữ này, có thể xem xét một phép loại suy đơn giản - bể nước lạnh được cấp nước qua van điều khiển vận hành bằng phao và với van cầu trên đường ống ra van ‘V’, như trong Hình 5.2.4. Cả hai van đều cùng kích thước và có cùng công suất dòng chảy và đặc tính dòng chảy. Mực nước mong muốn trong bể tại điểm B (tương đương với điểm đặt của bộ điều khiển mức). Có thể giả sử rằng, với van ‘V’ mở một nửa, (50% tải) có đúng lưu lượng nước đi vào qua van vận hành bằng phao để cung cấp dòng chảy mong muốn ra qua đường ống xả, và duy trì mực nước trong bể tại điểm B.
Hệ thống có thể được cho là cân bằng (lưu lượng nước vào và ra bể bằng nhau); dưới sự kiểm soát, trong điều kiện ổn định (mực nước không thay đổi) và chính xác tại mực nước mong muốn (B); cho dòng chảy ra yêu cầu.
Khi van ‘V’ đóng, mực nước trong bể tăng đến điểm A và van vận hành bằng phao cắt nguồn cung nước (xem Hình 5.2.5 bên dưới). Hệ thống vẫn dưới sự kiểm soát và ổn định nhưng kiểm soát trên mức B. Sự khác biệt giữa mức B và mức được kiểm soát thực tế, A, liên quan đến băng thông tỷ lệ của hệ thống điều khiển. Một lần nữa, nếu van ‘V’ mở một nửa cho 50% tải, mực nước trong bể sẽ trở về mức mong muốn, điểm B.
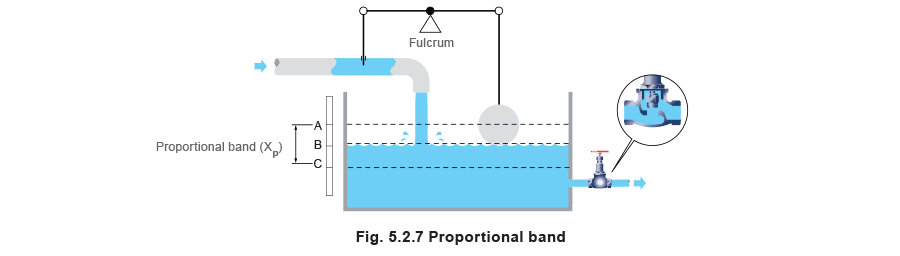
Hình 5.2.6 bên dưới, van ‘V’ mở hoàn toàn (100% tải). Van vận hành bằng phao sẽ cần hạ xuống để mở van vào rộng hơn và cho phép lưu lượng nước cao hơn để đáp ứng nhu cầu tăng từ đường ống xả. Khi đạt mức C, đủ nước sẽ đi vào để đáp ứng nhu cầu xả và mực nước sẽ được duy trì tại điểm C.
Hệ thống dưới sự kiểm soát và ổn định, nhưng có độ lệch; sự sai lệch mực nước giữa các điểm B và C. Hình 5.2.7 kết hợp ba điều kiện được sử dụng trong ví dụ này.
Sự khác biệt mực nước giữa điểm A và C được gọi là Băng thông Tỷ lệ hoặc P-band, vì đây là sự thay đổi mực nước (hoặc nhiệt độ trong trường hợp điều khiển nhiệt độ) để van điều khiển di chuyển từ hoàn toàn mở sang hoàn toàn đóng. Một ký hiệu được công nhận cho Băng thông Tỷ lệ là Xp. Phép loại suy minh họa một số điểm cơ bản và quan trọng liên quan đến điều khiển tỷ lệ:
- Van điều khiển được di chuyển tỷ lệ với lỗi mực nước (hoặc sai lệch nhiệt độ, trong trường hợp điều khiển nhiệt độ) so với điểm đặt
- Điểm đặt chỉ có thể được duy trì cho một điều kiện tải cụ thể.
- Trong khi điều khiển ổn định sẽ được đạt giữa các điểm A và C, bất kỳ tải nào gây ra sự khác biệt mực nước so với B sẽ luôn tạo ra độ lệch.
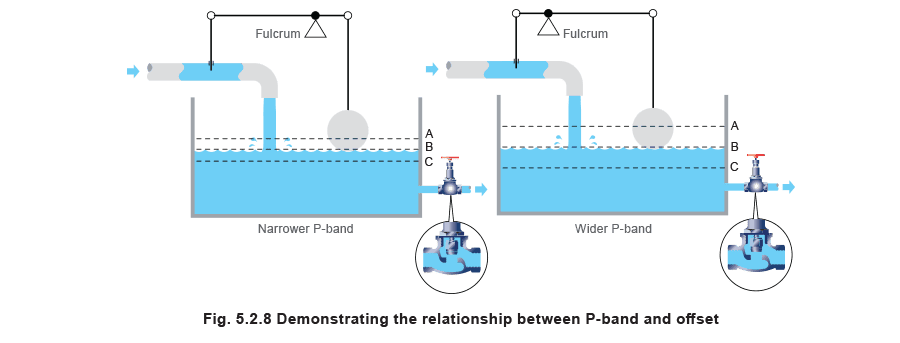
Lưu ý: Bằng cách thay đổi vị trí điểm tựa, Băng thông Tỷ lệ của hệ thống thay đổi. Gần phao cho P-band hẹp hơn, trong khi gần van cho P-band rộng hơn.
Hình 5.2.8 minh họa tại sao lại như vậy. Các vị trí điểm tựa khác nhau yêu cầu sự thay đổi mực nước khác nhau để di chuyển van từ hoàn toàn mở sang hoàn toàn đóng. Trong cả hai trường hợp, có thể thấy mức B đại diện cho mức 50% tải, A đại diện cho mức 0% tải, và C đại diện cho mức 100% tải. Cũng có thể thấy độ lệch lớn hơn ở bất kỳ tải tương đương nào với băng thông tỷ lệ rộng hơn.
Các ví dụ được mô tả trong Hình 5.2.4 đến 5.2.8 mô tả băng thông tỷ lệ là sự thay đổi mức (hoặc có thể là nhiệt độ hoặc áp suất v.v.) cần thiết để di chuyển van từ hoàn toàn mở sang hoàn toàn đóng. Điều này thuận tiện cho hệ thống cơ khí, nhưng định nghĩa tổng quát hơn (và chính xác hơn) của băng thông tỷ lệ là phần trăm thay đổi giá trị đo được cần thiết để tạo ra 100% thay đổi đầu ra. Do đó nó thường được biểu thị bằng phần trăm thay vì đơn vị kỹ thuật như độ C.
Đối với bộ điều khiển điện và khí nén, giá trị đặt ở giữa băng thông tỷ lệ. Hiệu ứng thay đổi P-band cho hệ thống điện hoặc khí nén có thể được mô tả với một ví dụ hơi khác, bằng cách sử dụng điều khiển nhiệt độ. Nhiệt độ không gian của tòa nhà được kiểm soát bởi hệ thống sưởi nước (kiểu bộ tản nhiệt) sử dụng điều khiển hành động tỷ lệ bằng van được vận hành bởi bộ truyền động điện, và bộ điều khiển điện tử và cảm biến nhiệt độ phòng. Điều khiển được chọn có băng thông tỷ lệ (P-band hoặc Xp) 6% của dải đầu vào bộ điều khiển 0° - 100°C, và nhiệt độ không gian nội thất mong muốn là 18°C.
Dưới một số điều kiện tải, van mở 50% và nhiệt độ nội thất yêu cầu chính xác ở 18°C. Sự giảm nhiệt độ bên ngoài xảy ra, dẫn đến tăng tốc độ mất nhiệt từ tòa nhà. Do đó, nhiệt độ nội thất sẽ giảm. Điều này sẽ được phát hiện bởi cảm biến nhiệt độ phòng, sẽ báo hiệu van di chuyển đến vị trí mở hơn cho phép nước nóng hơn đi qua bộ tản nhiệt phòng. Van được chỉ thị mở một lượng tỷ lệ với sự giảm nhiệt độ phòng. Theo cách đơn giản, nếu nhiệt độ phòng giảm 1°C, van có thể mở 10%; nếu nhiệt độ phòng giảm 2°C, van sẽ mở 20%. Theo thời gian, nhiệt độ bên ngoài ổn định và nhiệt độ bên trong ngừng giảm. Để cung cấp thêm nhiệt cần thiết cho nhiệt độ bên ngoài thấp hơn, van sẽ ổn định ở vị trí mở hơn; nhưng nhiệt độ bên trong thực tế sẽ hơi thấp hơn 18°C. Ví dụ 5.2.1 và Hình 5.2.9 giải thích thêm điều này, sử dụng P-band 6°C.
Ví dụ 5.2.1 Xem xét ứng dụng sưởi ấm không gian với các đặc điểm sau:
Ví dụ 5.2.1 Xem xét ứng dụng sưởi ấm không gian với các đặc điểm sau:
- Nhiệt độ yêu cầu trong tòa nhà là 18°C.
- Nhiệt độ phòng hiện tại là 18°C, và van mở 50%.
- Băng thông tỷ lệ được đặt ở 6% của 100°C = 6°C, cho 3°C mỗi bên điểm đặt 18°C. Hình 5.2.9 cho thấy mối quan hệ nhiệt độ phòng và van:
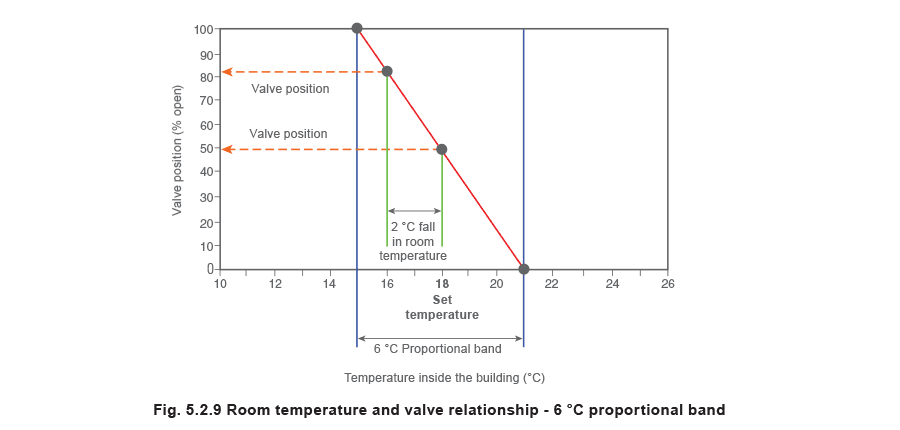
Ví dụ, xét nhiệt độ phòng giảm xuống 16 °C. Đây là giảm 2 °C của băng thông tỷ lệ 6 °C, nói cách khác, 33,3% băng thông tỷ lệ. Do đó van điều khiển phải mở thêm 33% đến 83%, như thể hiện trong Hình 5.2.9.
Với điều khiển tỷ lệ, nếu tải thay đổi, độ lệch cũng thay đổi:
- Tải dưới 50% sẽ khiến nhiệt độ phòng cao hơn giá trị đặt.
- Tải trên 50% sẽ khiến nhiệt độ phòng thấp hơn giá trị đặt. Sai lệch giữa nhiệt độ đặt trên bộ điều khiển (điểm đặt) và nhiệt độ phòng thực tế được gọi là ‘độ lệch tỷ lệ’. Trong Ví dụ 5.2.1, miễn là điều kiện tải giữ nguyên, điều khiển sẽ giữ ổn định ở độ mở van 83,3%; điều này được gọi là ‘độ lệch duy trì’.
Hiệu ứng điều chỉnh P-band
Hiệu ứng điều chỉnh P-band
Trong bộ điều khiển điện tử và khí nén, P-band có thể điều chỉnh. Điều này cho phép người dùng tìm cài đặt phù hợp cho ứng dụng riêng. Tăng P-band - Ví dụ, nếu ứng dụng trước đó được lập trình với băng thông tỷ lệ 12% tương đương 12°C, kết quả có thể thấy trong Hình 5.2.10. Lưu ý rằng P-band rộng hơn cho đường ‘khuếch đại’ dốc ít hơn. Với cùng sự thay đổi nhiệt độ phòng, chuyển động van sẽ nhỏ hơn. Thuật ngữ ‘khuếch đại’ được thảo luận trong phần sau. Trong trường hợp này, giảm 2°C nhiệt độ phòng sẽ cho độ mở van khoảng 68% từ biểu đồ trong Hình 5.2.10.
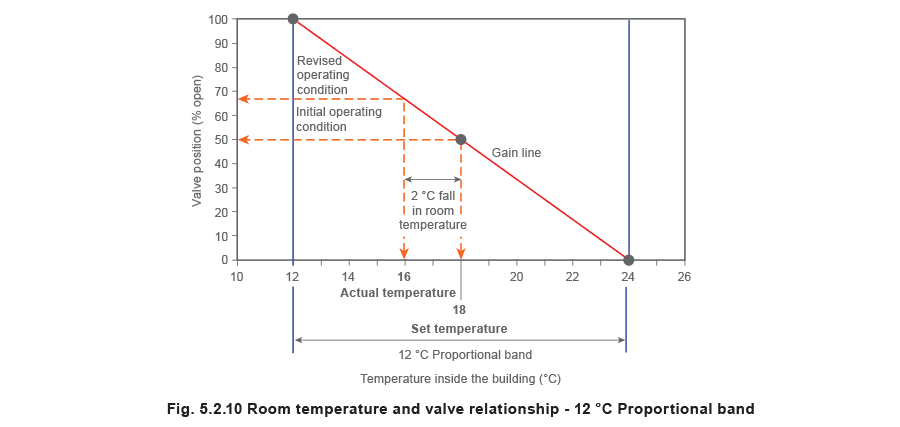
Giảm P-band - Ngược lại, nếu P-band giảm, chuyển động van trên mỗi đơn vị nhiệt độ tăng. Tuy nhiên, giảm P-band về không cho điều khiển bật/tắt. P-band lý tưởng là hẹp nhất có thể mà không tạo ra dao động đáng kể trong nhiệt độ phòng thực tế.
Khuếch đại
Khuếch đại
Thuật ngữ ‘khuếch đại’ thường được sử dụng với bộ điều khiển và đơn giản là nghịch đảo của băng thông tỷ lệ. Khuếch đại bộ điều khiển càng lớn, đầu ra bộ điều khiển sẽ thay đổi nhiều hơn cho một lỗi nhất định. Ví dụ với khuếch đại 1, lỗi 10% thang sẽ thay đổi đầu ra bộ điều khiển 10% thang, với khuếch đại 5, lỗi 10% sẽ thay đổi đầu ra bộ điều khiển 50% thang, trong khi với khuếch đại 10, lỗi 10% sẽ thay đổi đầu ra 100% thang. Băng thông tỷ lệ ‘theo độ’ sẽ phụ thuộc vào thang đầu vào bộ điều khiển. Ví dụ, với bộ điều khiển có thang đầu vào 200°C: Xp 20% = 20% của 200°C = 40°C Xp 10% = 10% của 200°C = 20°C The Steam and Condensate Loop 5.2.8 Ví dụ 5.2.2 Cho dải đầu vào bộ điều khiển là 100°C.
Nhắc nhở:
Nhắc nhở:
- Băng thông tỷ lệ rộng (khuếch đại nhỏ) sẽ cung cấp phản ứng kém nhạy hơn, nhưng ổn định hơn.
- Băng thông tỷ lệ hẹp (khuếch đại lớn) sẽ cung cấp phản ứng nhạy hơn, nhưng có giới hạn thực tế về mức độ hẹp có thể đặt Xp.
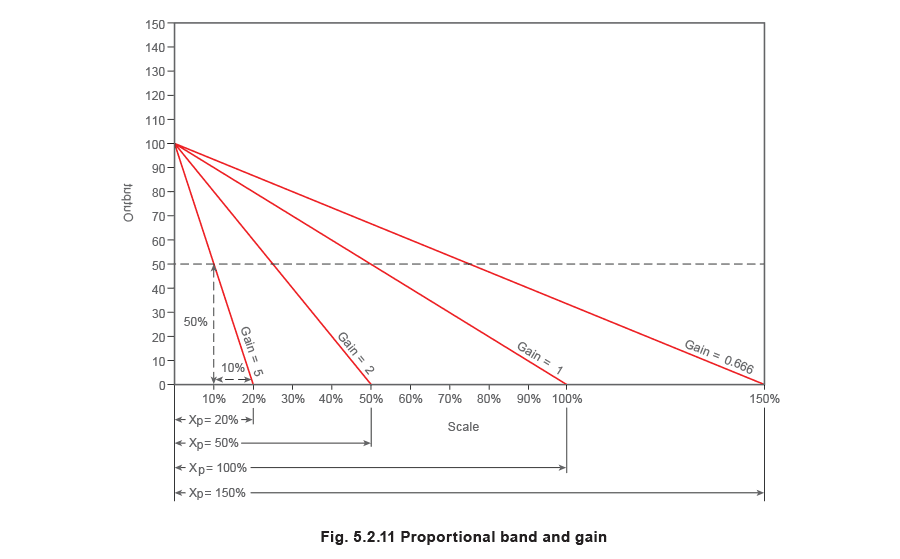
- Băng thông tỷ lệ quá hẹp (khuếch đại quá lớn) sẽ dẫn đến dao động và điều khiển bất ổn. Đối với bất kỳ bộ điều khiển nào với các P-band khác nhau, đường khuếch đại có thể được xác định như trong Hình 5.2.11, với dải đầu vào bộ điều khiển 100°C.
Tín hiệu điều khiển đảo hoặc thuận
Tín hiệu điều khiển đảo hoặc thuận
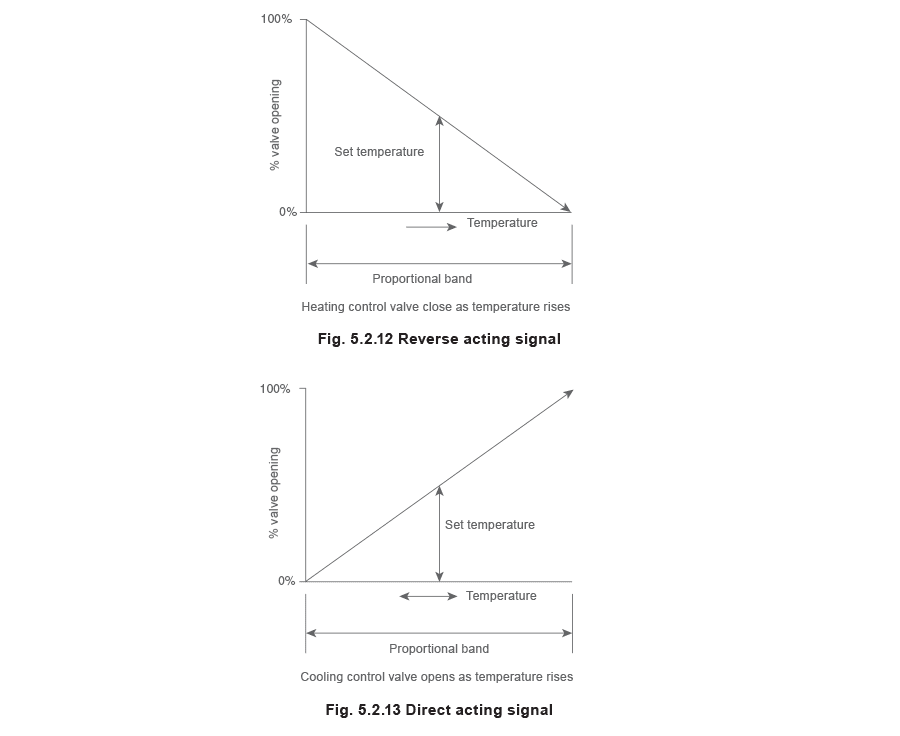
Nhìn kỹ hơn vào các hình minh họa được sử dụng cho đến nay để mô tả hiệu ứng điều khiển tỷ lệ cho thấy đầu ra được giả định là hành động đảo. Nói cách khác, sự tăng nhiệt độ quy trình khiến tín hiệu điều khiển giảm và van đóng. Đây thường là tình huống trên điều khiển sưởi ấm. Cấu hình này sẽ không hoạt động trên điều khiển làm mát; ở đây van phải mở khi nhiệt độ tăng. Điều này được gọi là tín hiệu điều khiển thuận. Hình 5.2.12 và 5.2.13 mô tả sự khác biệt giữa tín hiệu điều khiển đảo và thuận cho cùng hành động van.
Trên bộ điều khiển cơ khí (như bộ điều khiển khí nén) thường có thể đảo tín hiệu đầu ra của bộ điều khiển bằng cách xoay núm điều khiển tỷ lệ. Do đó, độ lớn của băng thông tỷ lệ và hướng của hành động điều khiển có thể được xác định từ cùng núm.
Trên bộ điều khiển điện tử, hành động đảo (RA) hoặc hành động thuận (DA) được chọn thông qua bàn phím.
Độ lệch đường khuếch đại hoặc hiệu ứng tỷ lệ
Độ lệch đường khuếch đại hoặc hiệu ứng tỷ lệ
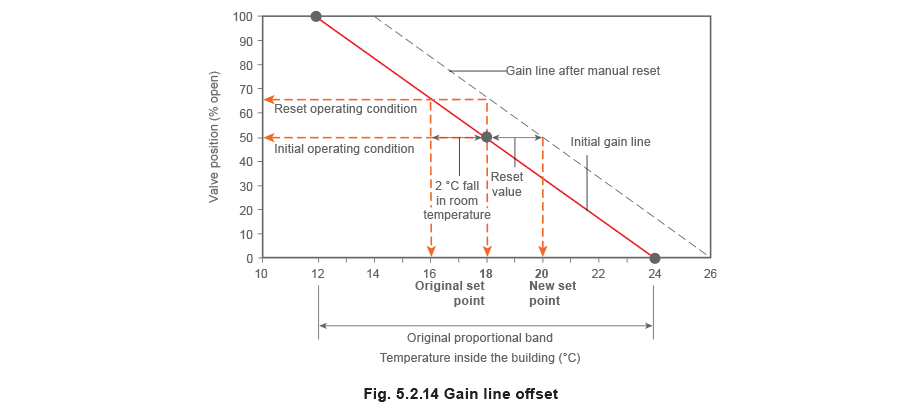
Từ giải thích về điều khiển tỷ lệ, nên rõ ràng là có độ lệch điều khiển hoặc sự sai lệch giá trị thực so với giá trị đặt bất cứ khi nào tải thay đổi từ 50%. Để minh họa thêm, xem xét Ví dụ 5.2.1 với P-band 12°C, nơi dự kiến độ lệch 2°C. Nếu độ lệch không thể chấp nhận bởi ứng dụng, thì phải loại bỏ. Điều này có thể đạt được bằng cách di chuyển (hoặc đặt lại) điểm đặt đến giá trị cao hơn. Điều này cung cấp cùng độ mở van sau khi đặt lại thủ công nhưng ở nhiệt độ phòng 18°C thay vì 16°C.
Đặt lại thủ công
Đặt lại thủ công
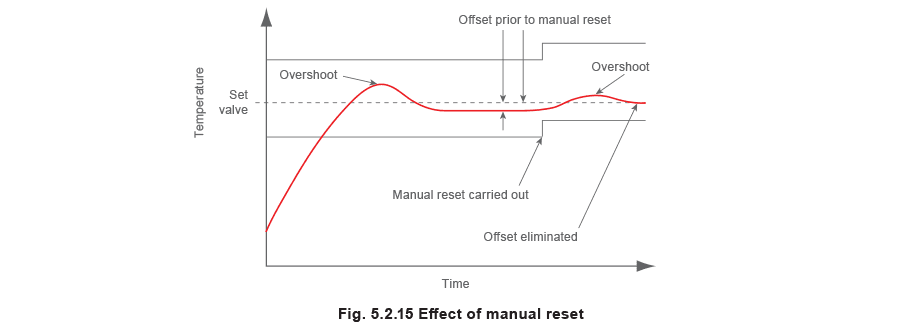
Độ lệch có thể được loại bỏ either thủ công hoặc tự động. Hiệu ứng đặt lại thủ công có thể thấy trong Hình 5.2.14, và giá trị được điều chỉnh thủ công bằng cách áp dụng độ lệch cho điểm đặt là 2°C. Nên rõ ràng từ Hình 5.2.14 và văn bản trên rằng hiệu ứng tương tự như tăng giá trị đặt thêm 2°C. Cùng độ mở van 66,7% giờ tương ứng với nhiệt độ phòng ở 18°C. Hiệu ứng của đặt lại thủ công được trình bày trong Hình 5.2.15.
Điều khiển tích phân - hành động đặt lại tự động
Điều khiển tích phân - hành động đặt lại tự động
‘Đặt lại thủ công’ thường không thỏa đáng trong nhà máy quy trình mà mỗi thay đổi tải sẽ yêu cầu hành động đặt lại. Cũng khá phổ biến khi người vận hành bị nhầm lẫn bởi sự khác biệt giữa:
- Giá trị đặt - Những gì trên núm.
- Giá trị thực - Giá trị quy trình thực tế.
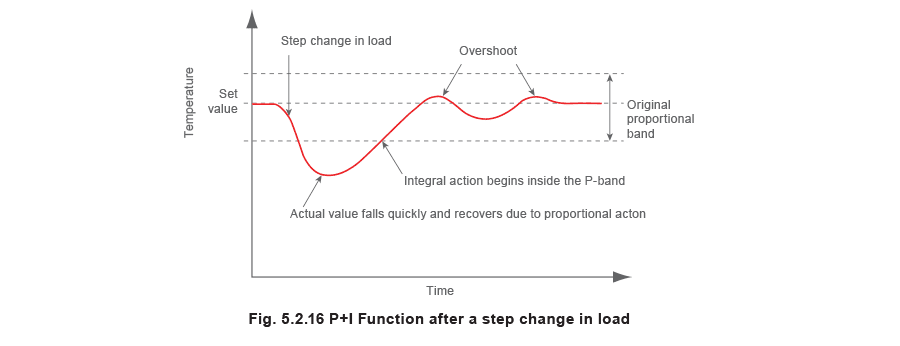
- Giá trị yêu cầu - Điều kiện quy trình hoàn hảo. Những vấn đề này được khắc phục bằng cách đưa hành động đặt lại vào cơ chế bộ điều khiển tự động. Bộ điều khiển như vậy chủ yếu là bộ điều khiển tỷ lệ. Sau đó có chức năng đặt lại được thêm vào, được gọi là ‘hành động tích phân’. Đặt lại tự động sử dụng quy trình tích hợp điện tử hoặc khí nén để thực hiện chức năng đặt lại. Thuật ngữ thường dùng nhất cho đặt lại tự động là hành động tích phân, được ký hiệu bằng chữ cái I. Chức năng của hành động tích phân là loại bỏ độ lệch bằng cách liên tục và tự động sửa đổi đầu ra bộ điều khiển theo độ lệch điều khiển tích hợp theo thời gian. Thời Gian Hành Động Tích Phân (IAT) được định nghĩa là thời gian để đầu ra bộ điều khiển thay đổi do hành động tích phân bằng với sự thay đổi đầu ra do hành động tỷ lệ. Hành động tích phân cho phép hành động sửa đổi tăng đều đặn miễn là lỗi tiếp tục tồn tại. Hành động sửa đổi đó sẽ tăng theo thời gian và do đó phải, tại một thời điểm nào đó, đủ để loại bỏ hoàn toàn lỗi trạng thái ổn định, với điều kiện đủ thời gian trôi qua trước khi thay đổi khác xảy ra. Bộ điều khiển cho phép điều chỉnh thời gian tích phân để phù hợp với hành vi động học của nhà máy. Tỷ lệ cộng tích phân (P + I) trở thành thuật ngữ cho bộ điều khiển kết hợp các tính năng này. Hành động tích phân trên bộ điều khiển thường bị giới hạn trong băng thông tỷ lệ. Phản ứng P + I điển hình được thể hiện trong Hình 5.2.16, cho thay đổi bước tải.
IAT có thể điều chỉnh trong bộ điều khiển:
- Nếu quá ngắn, phản ứng quá mức và bất ổn sẽ xảy ra.
- Nếu quá dài, hành động đặt lại sẽ rất chậm có hiệu quả. IAT được biểu thị bằng đơn vị thời gian. Trên một số bộ điều khiển, tham số có thể điều chỉnh cho hành động tích phân được gọi là ‘lặp lại mỗi phút’, là số lần mỗi phút mà đầu ra hành động tích phân thay đổi bằng sự thay đổi đầu ra tỷ lệ.
- Lặp lại mỗi phút =1/(IAT tính bằng phút)
- IAT = Vô cực - Có nghĩa là không có hành động tích phân
- IAT = 0 - Có nghĩa là hành động tích phân vô cực Điều quan trọng là kiểm tra hướng dẫn bộ điều khiển để xem hành động tích phân được chỉ định như thế nào.
Vượt quá và 'tích lũy'
Vượt quá và ‘tích lũy’
Với bộ điều khiển P + I (và với bộ điều khiển P), vượt quá có thể xảy ra khi có độ trễ thời gian trong hệ thống. Ví dụ điển hình của điều này là sau khi thay đổi tải đột ngột. Xem xét ứng dụng quy trình mà bộ trao đổi nhiệt quy trình được thiết kế để duy trì nước ở nhiệt độ cố định. Điểm đặt là 80°C, P-band được đặt ở 5°C (±2,5°C), và tải đột ngột thay đổi khiến nước quay về gần như ngay lập tức giảm xuống 60°C. Hình 5.2.16 cho thấy hiệu ứng của thay đổi đột ngột (bước thay đổi) tải này đối với nhiệt độ nước thực tế. Giá trị đo gần như ngay lập tức từ mức ổn định 80°C chuyển sang giá trị 60°C. Bản chất của quá trình tích hợp, việc tạo ra hành động điều khiển tích phân phải đi sau hành động điều khiển tỷ lệ,引入 độ trễ và thời gian chết nhiều hơn vào phản ứng. Điều này có thể có hậu quả nghiêm trọng trong thực tế, vì nó có nghĩa là phản ứng điều khiển ban đầu, mà trong hệ thống tỷ lệ sẽ là tức thì và phản ứng nhanh, giờ bị độ trễ và phản ứng chậm. Điều này có thể khiến giá trị thực mất kiểm soát và hệ thống dao động. Những dao động này có thể tăng hoặc giảm tùy thuộc vào giá trị tương đối của khuếch đại bộ điều khiển và hành động tích phân. Nếu áp dụng hành động tích phân, điều quan trọng là đảm bảo nó cần thiết và nếu có, đúng lượng hành động tích phân được áp dụng. Điều khiển tích phân cũng có thể làm trầm trọng thêm các tình huống khác. Nếu lỗi lớn trong thời gian dài, ví dụ sau thay đổi bước lớn hoặc hệ thống bị tắt, giá trị tích phân có thể trở nên quá lớn và gây ra vượt quá hoặc thiếu hụt phải mất thời gian dài để phục hồi. Để tránh vấn đề này, thường được gọi là ‘tích lũy tích phân’, các bộ điều khiển phức tạp sẽ ngăn chặn hành động tích phân cho đến khi hệ thống tiến gần trạng thái cân bằng. Để khắc phục những tình huống này, hữu ích khi đo tốc độ thay đổi nhiệt độ thực; nói cách khác, đo tốc độ thay đổi của tín hiệu. Một loại chế độ điều khiển khác được sử dụng để đo giá trị đo thay đổi nhanh như thế nào, và điều này được gọi là Hành động Tốc độ hoặc Hành động Đạo hàm.
Điều khiển đạo hàm - hành động tốc độ
Điều khiển đạo hàm - hành động tốc độ
Hành động Đạo hàm (ký hiệu bằng chữ cái D) đo và phản ứng với tốc độ thay đổi của tín hiệu quy trình, và điều chỉnh đầu ra bộ điều khiển để giảm thiểu vượt quá. Nếu được áp dụng đúng trên hệ thống có độ trễ thời gian, hành động đạo hàm sẽ giảm thiểu độ lệch từ điểm đặt khi có thay đổi trong điều kiện quy trình. Điều thú vị là hành động đạo hàm chỉ áp dụng khi có thay đổi tín hiệu quy trình. Nếu giá trị ổn định, bất kể độ lệch, thì hành động đạo hàm không xảy ra. Một chức năng hữu ích của hàm đạo hàm là vượt quá có thể được giảm thiểu đặc biệt trên thay đổi tải nhanh. Tuy nhiên, hành động đạo hàm không dễ áp dụng đúng; nếu không đủ, ít lợi ích đạt được, và áp dụng quá nhiều có thể gây ra nhiều vấn đề hơn nó giải quyết. Hành động D lại có thể điều chỉnh trong bộ điều khiển, và được ký hiệu là TD tính bằng đơn vị thời gian: TD = 0 - Có nghĩa là không có hành động D. TD = Vô cực - Có nghĩa là hành động D vô cực. Bộ điều khiển P + D có thể có, nhưng có thể gặp độ lệch tỷ lệ. Đáng nhớ là nhược điểm chính của điều khiển P là sự hiện diện của độ lệch. Để khắc phục và loại bỏ độ lệch, hành động ‘I’ được引入. Sự hiện diện thường xuyên của độ trễ thời gian trong vòng lặp điều khiển giải thích nhu cầu cho hành động thứ ba D. Kết quả là bộ điều khiển P + I + D mà, nếu được tinh chỉnh đúng, trong hầu hết quy trình có thể cho phản ứng nhanh và ổn định, không có độ lệch và không vượt quá.
Bộ điều khiển PID
Bộ điều khiển PID
P và I và D được gọi là ‘số hạng’ và do đó bộ điều khiển P + I + D thường được gọi là bộ điều khiển ba số hạng.
Các đặc tính khác nhau có thể được tóm tắt, như thể hiện trong Hình 5.2.17.
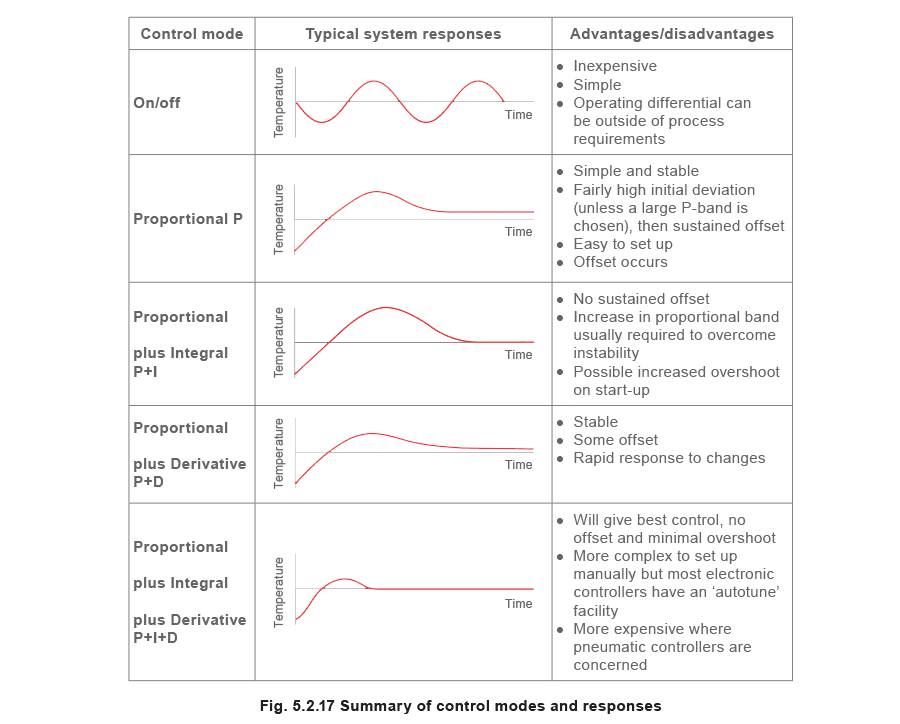
Cuối cùng, kỹ sư điều khiển phải cố gắng tránh nguy hiểm sử dụng điều khiển không cần thiết phức tạp cho ứng dụng cụ thể. Hành động điều khiển ít phức tạp nhất, mà sẽ cung cấp mức độ điều khiển yêu cầu, nên luôn được chọn.
Thuật ngữ bổ sung
Thuật ngữ bổ sung
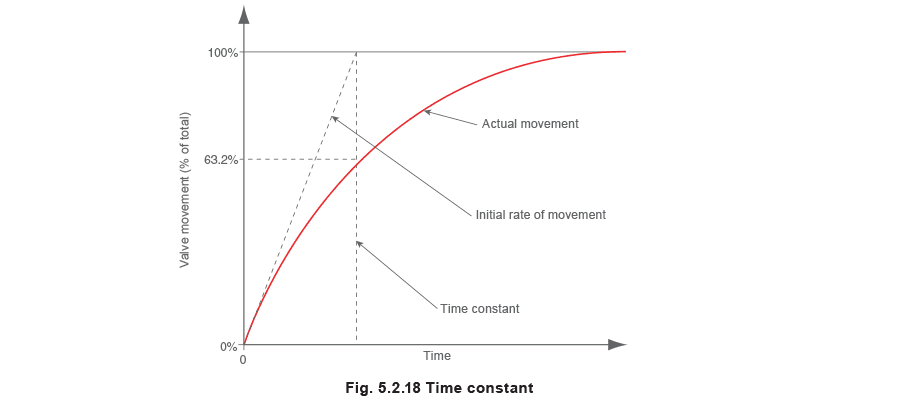
Hằng số thời gian Điều này được định nghĩa là: ‘Thời gian để đầu ra bộ điều khiển thay đổi 63,2% tổng do thay đổi bước (hoặc đột ngột) trong tải quy trình’. Trong thực tế, giải thích phức tạp hơn vì hằng số thời gian thực sự là thời gian để tín hiệu hoặc đầu ra đạt giá trị cuối từ giá trị ban đầu, nếu tốc độ tăng ban đầu được duy trì. Khái niệm này được描绘 trong Hình 5.12.18.
Ví dụ 5.2.2 Sự đánh giá thực tế về hằng số thời gian
Ví dụ 5.2.2 Sự đánh giá thực tế về hằng số thời gian
Xét hai bể nước, bể A ở nhiệt độ 25°C, và bể B ở 75°C. Cảm biến được đặt trong bể A và cho phép đạt nhiệt độ cân bằng. Sau đó nó được nhanh chóng chuyển sang bể B. Sự khác biệt nhiệt độ giữa hai bể là 50°C, và 63,2% khoảng nhiệt độ này có thể được tính như dưới đây: 63,2% của 50°C = 31,6°C Nhiệt độ cơ sở ban đầu là 25°C, do đó hằng số thời gian cho ví dụ đơn giản này là thời gian cần thiết để cảm biến đạt 56,6°C, như dưới đây: 25°C + 31,6°C = 56,6°C
Săn tìm
Săn tìm
Thường được gọi là bất ổn, chu kỳ hoặc dao động. Săn tìm tạo ra độ lệch liên tục thay đổi từ điểm vận hành bình thường. Điều này có thể do:
- Băng thông tỷ lệ quá hẹp.
- Thời gian tích phân quá ngắn.
- Thời gian đạo hàm quá dài.
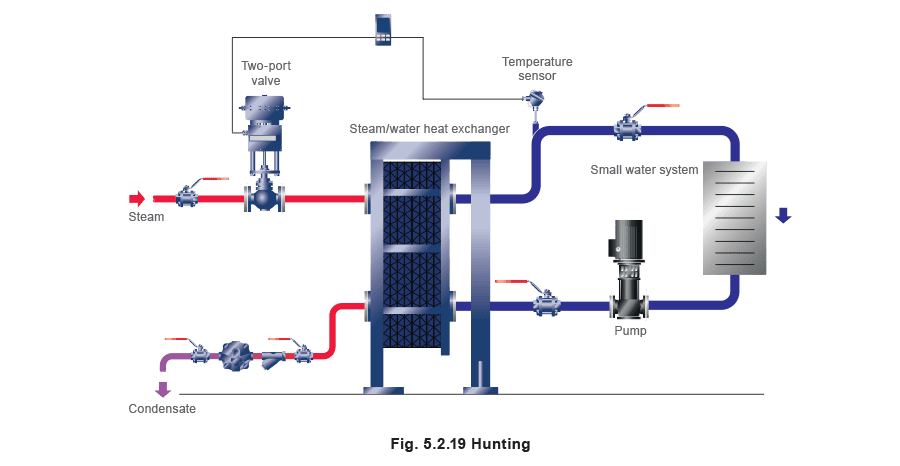
- Sự kết hợp của những điều này. Hằng số thời gian dài hoặc thời gian chết trong hệ thống điều khiển hoặc chính quy trình. Trong Hình 5.2.19 bộ trao đổi nhiệt quá lớn cho ứng dụng. Điều khiển nhiệt độ chính xác sẽ khó đạt được và có thể dẫn đến băng thông tỷ lệ lớncố gắng đạt ổn định. Nếu tải hệ thống đột ngột tăng, van hai cổng sẽ mở rộng hơn, lấp đầy bộ trao đổi nhiệt bằng hơi nước nhiệt độ cao. Tốc độ truyền nhiệt tăng cực kỳ nhanh khiến nhiệt độ hệ thống nước vượt quá. Sự tăng nhanh nhiệt độ nước được cảm biến phát hiện và chỉ thị van hai cổng đóng nhanh. Điều này khiến nhiệt độ nước giảm, và van hai cổng mở lại. Chu kỳ này lặp lại, chu kỳ chỉ停止 khi các số hạng PID được điều chỉnh. Ví dụ sau (Ví dụ 5.2.3) cho thấy hiệu ứng của hệ thống hơi săn tìm.
Ví dụ 5.2.3 Hiệu ứng săn tìm trên hệ thống trong Hình 5.2.19
Ví dụ 5.2.3 Hiệu ứng săn tìm trên hệ thống trong Hình 5.2.19
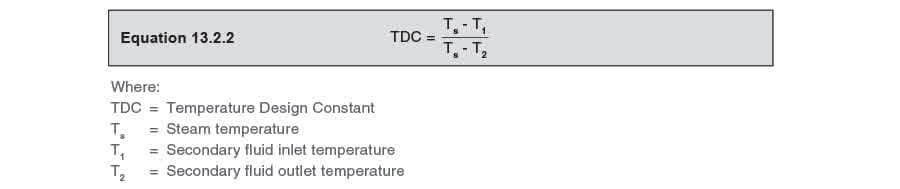
Xem xét hệ thống trao đổi nhiệt hơi-nước trong Hình 5.2.19. Dưới điều kiện tải tối thiểu, kích thước bộ trao đổi nhiệt khiến nó đun nóng nước thứ cấp lưu lượng không đổi từ 60°C đến 65°C với nhiệt độ hơi 70°C. Bộ điều khiển có điểm đặt 65°C và P-band 10°C. Xem xét sự tăng đột ngột tải thứ cấp, khiến nước quay về gần như ngay lập tức giảm 40°C. Nhiệt độ nước chảy ra từ bộ trao đổi nhiệt cũng sẽ giảm 40°C xuống 25°C. Cảm biến phát hiện điều này và, vì nhiệt độ này dưới P-band, nó chỉ thị van hơi vận hành bằng khí nén mở hoàn toàn. Nhiệt độ hơi được quan sát tăng từ 70°C đến 140°C gần như ngay lập tức. Hiệu ứng lên nhiệt độ nước thứ cấp và ổn định hệ thống điều khiển là gì? Như được trình bày trong Module 13.2 (Mối quan hệ tải nhiệt, bộ trao đổi nhiệt và tải hơi), hằng số thiết kế nhiệt độ bộ trao đổi nhiệt, TDC, có thể được tính từ điều kiện vận hành quan sát và Phương trình 13.2.2:
Trong ví dụ này, điều kiện quan sát (ở tải tối thiểu) như sau:
Khi nhiệt độ hơi tăng đến 140°C, có thể dự đoán nhiệt độ đầu ra từ Phương trình 13.2.5:
Nhiệt độ đầu ra bộ trao đổi nhiệt là 80°C, bây giờ cao hơn P-band, và cảm biến bây giờ báo hiệu bộ điều khiển đóng van hơi.
Nhiệt độ hơi giảm nhanh, khiến nhiệt độ nước đầu ra giảm; và van hơi mở lại. Hệ thống xoay quanh những nhiệt độ này cho đến khi thay đổi tham số điều khiển. Những triệu chứng này được gọi là ‘săn tìm’. Van điều khiển và bộ điều khiển của nó đang săn tìm để tìm điều kiện ổn định. Trong thực tế, các yếu tố khác sẽ thêm vào sự không chắc chắn của tình huống, như kích thước hệ thống và phản ứng với thay đổi nhiệt độ và vị trí cảm biến. Săn tìm loại này có thể gây mài mòn sớm các thành phần hệ thống, đặc biệt van và bộ truyền động, và cho điều khiển kém. Ví dụ 5.2.3 không điển hình cho ứng dụng thực tế. Trong thực tế, thiết kế và định cỡ đúng bộ điều khiển và bộ trao đổi nhiệt hơi nước sẽ không phải là vấn đề.
Trễ
Trễ
Trễ là độ trễ trong phản ứng và sẽ tồn tại trong cả hệ thống điều khiển và trong quy trình hoặc hệ thống được kiểm soát. Xem xét một căn phòng nhỏ được sưởi ấm bởi máy sưởi, được kiểm soát bởi bộ điều nhiệt không gian phòng. Một cửa sổ lớn được mở cho phép lượng lớn không khí lạnh vào. Nhiệt độ phòng sẽ giảm nhưng sẽ có độ trễ trong khi khối lượng cảm biến giảm nhiệt độ đến nhiệt độ mới - điều này được gọi là trễ điều khiển. Thời gian trễ còn được gọi là thời gian chết. Sau đó yêu cầu thêm nhiệt từ máy sưởi phòng, sẽ mất một thời gian trước khi điều này có hiệu ứng và làm nóng phòng đến mức bộ điều nhiệt hài lòng. Điều này được gọi là trễ hệ thống hoặc trễ nhiệt.
Tỷ lệ phạm vi
Tỷ lệ phạm vi
Điều này liên quan đến van điều khiển và là tỷ lệ giữa lưu lượng có thể kiểm soát tối đa và lưu lượng có thể kiểm soát tối thiểu, giữa đó đặc tính van (tuyến tính, phần trăm bằng nhau, mở nhanh) sẽ được duy trì. Với hầu hết van điều khiển, tại một thời điểm nào đó trước khi đạt vị trí đóng hoàn toàn, không còn kiểm soát xác định đối với dòng chảy theo đặc tính van. Các nhà sản xuất uy tín sẽ cung cấp con số tỷ lệ phạm vi cho van của họ.
Tỷ lệ giảm tải
Tỷ lệ giảm tải
Tỷ lệ giảm tải là tỷ lệ giữa lưu lượng tối đa và lưu lượng có thể kiểm soát tối thiểu. Nó sẽ thấp hơn đáng kể tỷ lệ phạm vi của van nếu van quá lớn. Mặc dù định nghĩa chỉ liên quan đến van, nó là chức năng của toàn bộ hệ thống điều khiển.