Giải thích về từng thành phần của hệ thống điều khiển, bao gồm van, bộ truyền động, cảm biến và bộ điều khiển; cùng với giới thiệu về các phương pháp điều khiển và động lực học hệ thống, bao gồm các vòng lặp điều khiển đơn giản và hệ thống phản hồi.
Vòng lặp điều khiển là gì?
Vòng lặp điều khiển là gì?
Chương này giới thiệu về các hệ thống điều khiển hoàn chỉnh, bao gồm van, bộ truyền động, cảm biến, bộ điều khiển và động lực học của chính quá trình. Vòng lặp điều khiển
Hệ thống điều khiển vòng hở
Điều khiển vòng hở đơn giản có nghĩa là không có phản hồi trực tiếp từ điều kiện được kiểm soát; nói cách khác, không có thông tin nào được gửi trả lại từ quá trình hoặc hệ thống đang được kiểm soát để thông báo cho bộ điều khiển rằng cần thực hiện hành động điều chỉnh. Hệ thống sưởi được thể hiện trong Hình 5.3.1 minh họa điều này bằng cách sử dụng cảm biến bên ngoài phòng đang được sưởi. Hệ thống được thể hiện trong Hình 5.3.1 không phải là ví dụ về hệ thống điều khiển sưởi thực tế; nó chỉ được sử dụng để mô tả nguyên lý điều khiển vòng hở.
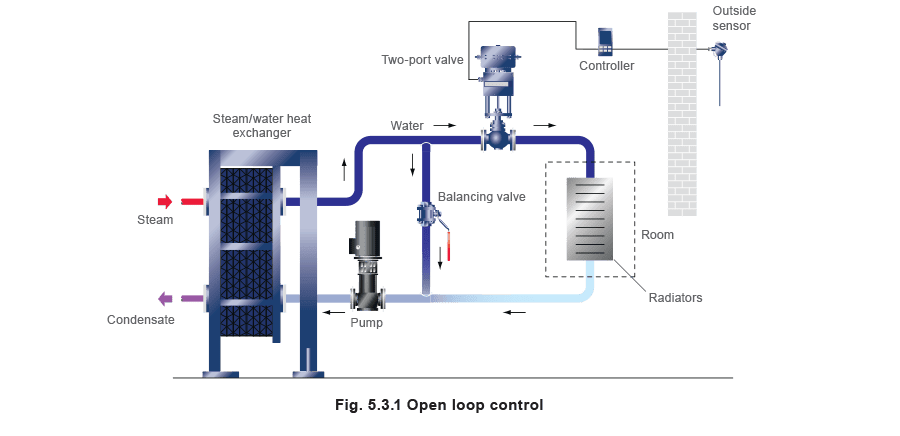
Hệ thống bao gồm một bộ điều khiển tỷ lệ với cảm biến bên ngoài đo nhiệt độ không khí môi trường. Bộ điều khiển có thể được đặt với dải tỷ lệ khá rộng, sao cho ở nhiệt độ môi trường -1°C van mở hoàn toàn, và ở nhiệt độ môi trường 19°C van đóng hoàn toàn. Vì nhiệt độ môi trường sẽ ảnh hưởng đến tổn thất nhiệt của tòa nhà, hy vọng rằng nhiệt độ phòng sẽ được kiểm soát.
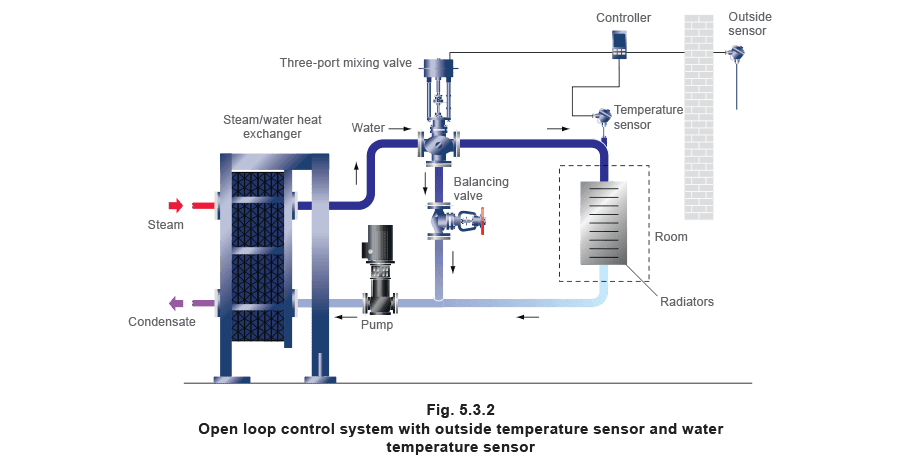
Tuy nhiên, không có phản hồi về nhiệt độ phòng và lượng sưởi do các yếu tố khác. Trong thời tiết ôn hòa, mặc dù lưu lượng nước đang được kiểm soát, các yếu tố khác như bức xạ mặt trời cao có thể khiến phòng quá nóng. Nói cách khác, điều khiển vòng hở chỉ cung cấp khả năng kiểm soát thô cho ứng dụng. Hình 5.3.2 mô tả một hệ thống điều khiển tinh vi hơn một chút với hai cảm biến.
Điều khiển vòng kín
Hệ thống sử dụng van pha ba cửa với bộ truyền động, bộ điều khiển và cảm biến không khí bên ngoài, cùng với cảm biến nhiệt độ trong đường nước.
Cảm biến nhiệt độ bên ngoài cung cấp đầu vào điểm đặt từ xa cho bộ điều khiển, được sử dụng để điều chỉnh điểm đặt nhiệt độ nước. Theo cách này, điều khiển vòng kín áp dụng cho nhiệt độ nước chảy qua bộ tản nhiệt. Khi trời lạnh bên ngoài, nước chảy qua bộ tản nhiệt ở nhiệt độ tối đa. Khi nhiệt độ bên ngoài tăng, bộ điều khiển tự động giảm nhiệt độ nước chảy qua bộ tản nhiệt. Tuy nhiên, đây vẫn là điều khiển vòng hở đối với nhiệt độ phòng, vì không có phản hồi từ tòa nhà hoặc không gian đang được sưởi. Nếu bộ tản nhiệt quá lớn hoặc có lỗi thiết kế, quá nóng vẫn sẽ xảy ra.
Điều khiển vòng kín
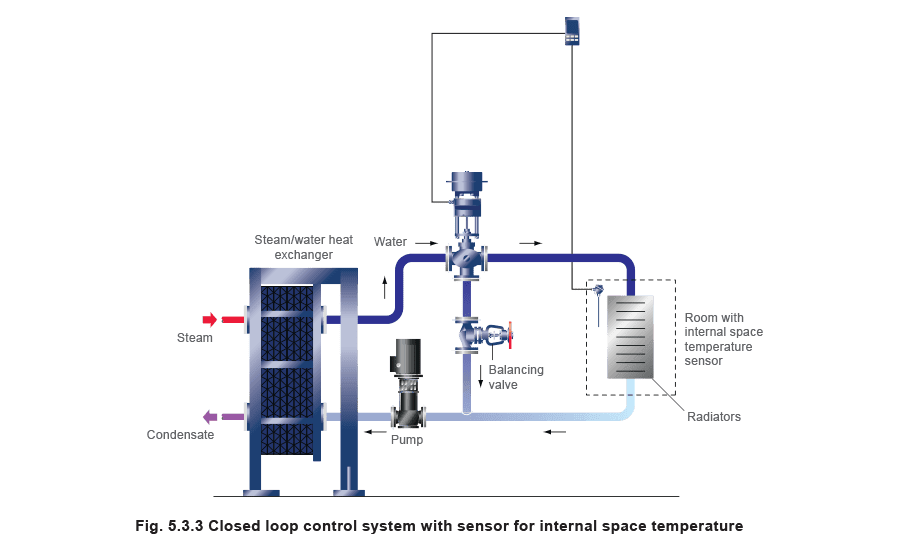
Rất đơn giản, điều khiển vòng kín yêu cầu phản hồi; thông tin được gửi trả lại trực tiếp từ quá trình hoặc hệ thống. Sử dụng hệ thống sưởi đơn giản được thể hiện trong Hình 5.3.3, việc thêm cảm biến nhiệt độ không gian bên trong sẽ phát hiện nhiệt độ phòng và cung cấp điều khiển vòng kín đối với phòng. Trong Hình 5.3.3, van và bộ truyền động được điều khiển thông qua cảm biến nhiệt độ không gian trong phòng, cung cấp phản hồi từ nhiệt độ phòng thực tế.
Nhiễu loạn
Nhiễu loạn
Nhiễu loạn là các yếu tố xâm nhập vào quá trình hoặc hệ thống để làm thay đổi giá trị của môi chất được kiểm soát. Các nhiễu loạn này có thể do thay đổi tải hoặc do ảnh hưởng từ bên ngoài. Ví dụ; nếu trong một hệ thống sưởi đơn giản, một phòng đột nhiên đầy người, điều này sẽ tạo thành nhiễu loạn, vì nó sẽ ảnh hưởng đến nhiệt độ phòng và lượng nhiệt cần thiết để duy trì nhiệt độ không gian mong muốn.
Điều khiển phản hồi
Điều khiển phản hồi
Đây là một loại điều khiển vòng kín khác. Điều khiển phản hồi tính đến các nhiễu loạn và đưa thông tin này trở lại bộ điều khiển, để cho phép thực hiện hành động điều chỉnh. Ví dụ, nếu một số lượng lớn người vào phòng, nhiệt độ không gian sẽ tăng, sau đó sẽ khiến hệ thống điều khiển giảm lượng nhiệt đưa vào phòng.
Điều khiển feed-forward
Điều khiển feed-forward
Với điều khiển feed-forward, các tác động của bất kỳ nhiễu loạn nào được dự đoán trước và được xử lý trước khi sự kiện thực sự xảy ra. Một ví dụ về điều này là đưa lò hơi lên chế độ lửa lớn trước khi đưa nhà máy sử dụng hơi nước lớn vào hoạt động. Trình tự sự kiện có thể là nhà máy được bật. Hành động này, thay vì mở van hơi nước đến quá trình, sẽ hướng dẫn bộ đốt lò hơi chuyển sang chế độ lửa lớn. Chỉ khi đạt đến vị trí lửa lớn thì van hơi nước quá trình mới được phép mở, và sau đó mở từ từ, có kiểm soát.
Điều khiển vòng đơn
Điều khiển vòng đơn
Đây là vòng lặp điều khiển đơn giản nhất chỉ liên quan đến một biến được kiểm soát, ví dụ, nhiệt độ. Để giải thích điều này, một bộ trao đổi nhiệt từ hơi sang nước được xem xét như trong Hình 5.3.4.
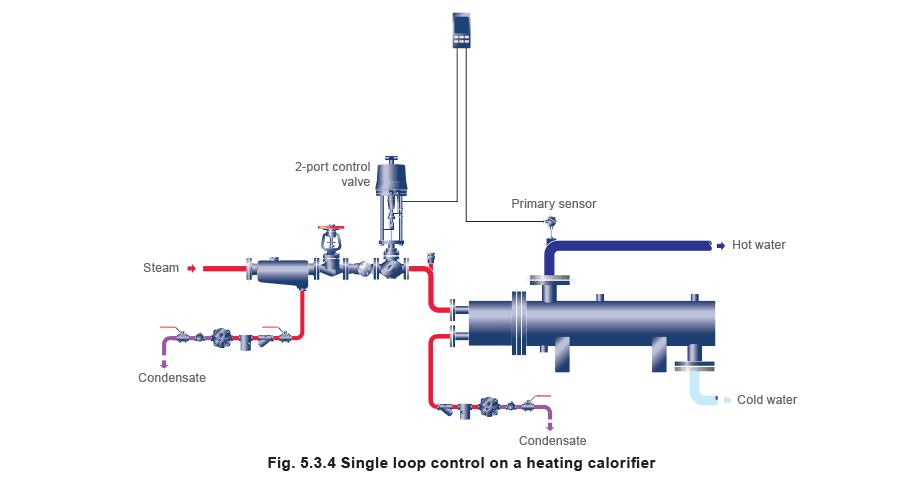
Biến duy nhất được kiểm soát trong Hình 5.3.4 là nhiệt độ của nước rời khỏi bộ trao đổi nhiệt. Điều này được thực hiện bằng cách kiểm soát van hơi nước 2 cửa cung cấp hơi cho bộ trao đổi nhiệt. Cảm biến chính có thể là cặp nhiệt điện hoặc nhiệt kế điện trở bạch kim PT100 đo nhiệt độ nước.
Bộ điều khiển so sánh tín hiệu từ cảm biến với điểm đặt trên bộ điều khiển. Nếu có sự khác biệt, bộ điều khiển gửi tín hiệu đến bộ truyền động của van, sau đó di chuyển van đến vị trí mới. Bộ điều khiển cũng có thể bao gồm chỉ báo đầu ra, hiển thị phần trăm mở van. Các vòng lặp điều khiển đơn cung cấp phần lớn khả năng điều khiển cho hệ thống sưởi và quy trình công nghiệp. Các thuật ngữ khác được sử dụng cho vòng lặp điều khiển đơn bao gồm:
- Điều khiển giá trị đặt
- Điều khiển vòng kín đơn.
- Điều khiển phản hồi.
Điều khiển đa vòng
Điều khiển đa vòng
Ví dụ sau xem xét một ứng dụng cho sản phẩm gỗ di chuyển chậm, phải được kiểm soát ở mức độ ẩm cụ thể (xem Hình 5.3.5 và 5.3.6).
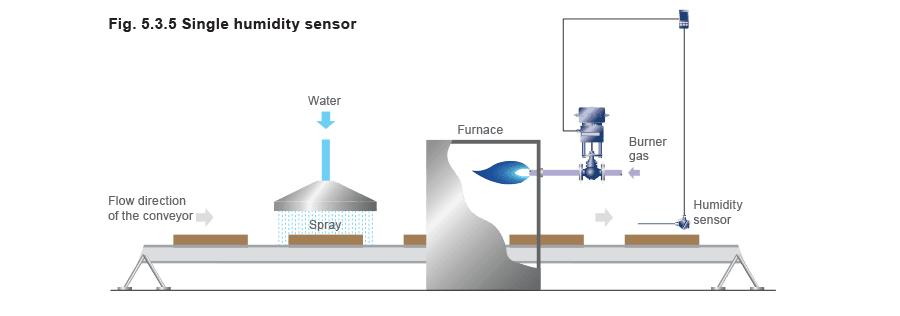
Trong Hình 5.3.5, cảm biến độ ẩm đơn ở cuối băng tải kiểm soát lượng nhiệt được bổ sung bởi lò. Nhưng nếu tốc độ phun nước thay đổi do, ví dụ, biến động áp suất cấp nước, có thể mất khoảng 10 phút trước khi sản phẩm đến cuối băng tải và cảm biến độ ẩm phản ứng. Điều này sẽ gây ra biến động chất lượng sản phẩm.
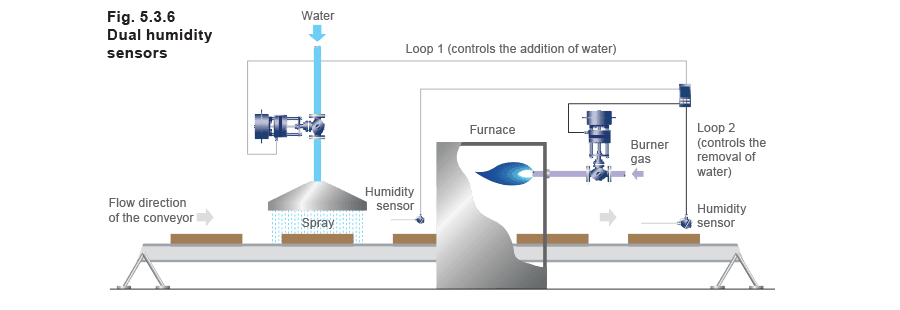
Để cải thiện điều khiển, một cảm biến độ ẩm thứ hai trên vòng lặp điều khiển khác có thể được lắp đặt ngay sau vòi phun nước, như trong Hình 5.3.6. Cảm biến độ ẩm này cung cấp đầu vào điểm đặt từ xa cho bộ điều khiển được sử dụng để điều chỉnh điểm đặt cục bộ. Điểm đặt cục bộ được đặt ở độ ẩm yêu cầu sau lò. Điều này, ở dạng đơn giản, minh họa điều khiển đa vòng. Hệ thống kiểm soát độ ẩm này bao gồm hai vòng lặp điều khiển:
- Vòng 1 kiểm soát việc bổ sung nước.
- Vòng 2 kiểm soát việc loại bỏ nước. Trong quá trình này, các yếu tố sẽ ảnh hưởng đến cả hai vòng. Một số yếu tố như áp suất nước sẽ ảnh hưởng đến cả hai vòng. Vòng 1 sẽ cố gắng sửa điều này, nhưng bất kỳ lỗi kết quả nào sẽ có tác động đến Vòng 2
Điều khiển cascade
Điều khiển cascade
Khi hai biến độc lập cần được kiểm soát bằng một van, hệ thống điều khiển cascade có thể được sử dụng. Hình 5.3.7 cho thấy một bình jacket hơi chứa đầy sản phẩm lỏng. Các khía cạnh thiết yếu của quá trình rất nghiêm ngặt:
- Sản phẩm trong bình phải được làm nóng đến một nhiệt độ nhất định.
- Hơi nước không được vượt quá một nhiệt độ nhất định nếu không sản phẩm có thể bị hư hỏng
- Nhiệt độ sản phẩm không được tăng nhanh hơn một tốc độ nhất định nếu không sản phẩm có thể bị hư hỏng. Nếu một điều khiển vòng đơn bình thường được sử dụng với cảm biến trong chất lỏng, ở đầu quá trình cảm biến sẽ phát hiện nhiệt độ thấp, và bộ điều khiển sẽ ra lệnh cho van di chuyển đến vị trí mở hoàn toàn. Điều này sẽ dẫn đến vấn đề do nhiệt độ hơi nước quá cao trong jacket.
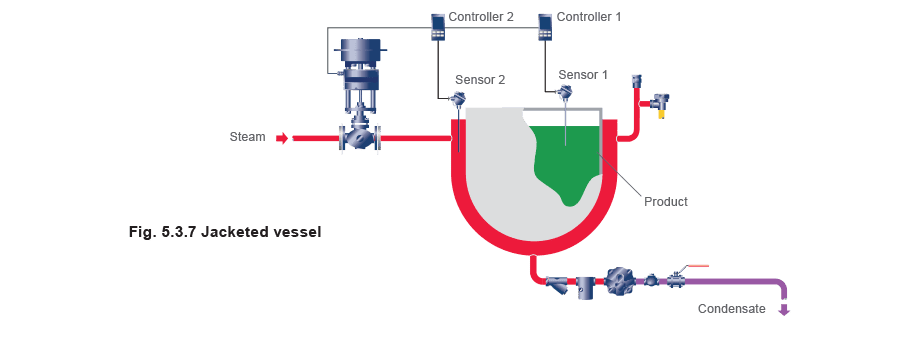
Giải pháp là sử dụng điều khiển cascade với hai bộ điều khiển và hai cảm biến:
- Một bộ điều khiển slave (Bộ điều khiển 2) và cảm biến giám sát nhiệt độ hơi trong jacket, và xuất tín hiệu đến van điều khiển
- Một bộ điều khiển master (Bộ điều khiển 1) và cảm biến giám sát nhiệt độ sản phẩm với đầu ra bộ điều khiển được hướng đến bộ điều khiển slave.
- Tín hiệu đầu ra từ bộ điều khiển master được sử dụng để thay đổi điểm đặt trong bộ điều khiển slave, đảm bảo rằng nhiệt độ hơi không bị vượt quá. Ví dụ 5.3.1 Ví dụ về điều khiển cascade áp dụng cho bình quá trình Nhiệt độ chất lỏng sẽ được làm nóng từ 15°C đến 80°C và duy trì ở 80°C trong hai giờ. Nhiệt độ hơi nước không được vượt quá 120°C trong bất kỳ trường hợp nào. Nhiệt độ sản phẩm không được tăng nhanh hơn 1°C/phút. Bộ điều khiển master có thể được lập trình để tốc độ tăng nhiệt độ nước không cao hơn mức đã chỉ định. Bộ điều khiển master được đặt ở chế độ đảo chiều, sao cho tín hiệu đầu ra đến bộ điều khiển slave là 20 mA ở nhiệt độ thấp và 4 mA ở nhiệt độ cao. Điểm đặt từ xa trên bộ điều khiển slave được đặt sao cho tín hiệu đầu ra đến van là 4 mA khi nhiệt độ hơi là 80°C, và 20 mA khi nhiệt độ hơi là 120°C. Theo cách này, nhiệt độ hơi không thể cao hơn mức chịu đựng của hệ thống, và áp suất hơi trong jacket không thể cao hơn áp suất bão hòa, 1 bar g, ở 120°C.
Động lực học của quá trình
Động lực học của quá trình
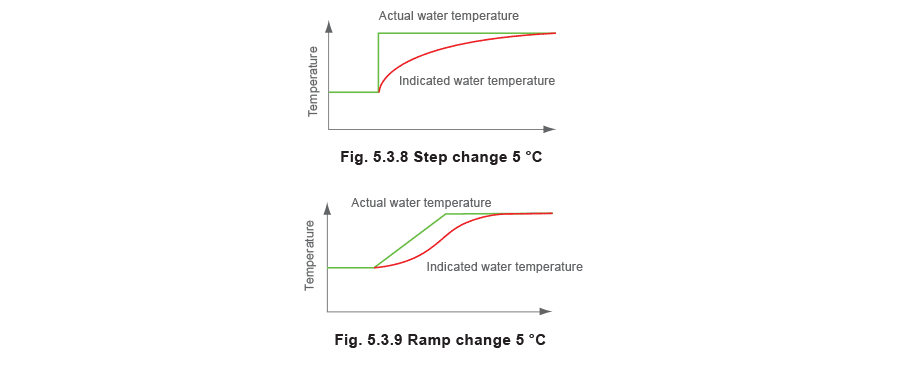
Đây là một chủ đề rất phức tạp nhưng phần này sẽ đề cập đến các cân nhắc cơ bản nhất. Thuật ngữ ‘hằng số thời gian’, đề cập đến định nghĩa thời gian di chuyển của bộ truyền động, đã được trình bày trong Chương 5.1; nhưng để nhắc lại, đó là thời gian để hệ thống điều khiển đạt được khoảng hai phần ba tổng hành trình do một thay đổi bước cụ thể về nhiệt độ, hoặc biến khác. Các phần khác của hệ thống điều khiển sẽ có phản hồi dựa trên thời gian tương tự - bộ điều khiển và các thành phần của nó và chính cảm biến. Tất cả các thiết bị đều có độ trễ thời gian giữa đầu vào vào thiết bị và đầu ra tiếp theo. Ngay cả hệ thống truyền tải cũng sẽ có độ trễ thời gian - không phải là vấn đề với hệ thống điện/tử nhưng là yếu tố có thể cần được tính đến với hệ thống truyền tải khí nén. Hình 5.3.8 và 5.3.9 cho thấy một số độ trễ phản hồi điển hình cho cặp nhiệt điện đã được lắp đặt trong ống bảo hộ để đo nhiệt độ nước.
Ngoài các độ trễ trong phản hồi cảm biến, các phần khác của hệ thống điều khiển cũng ảnh hưởng đến thời gian phản hồi. Với hệ thống khí nén và tự hành, chuyển động van/bộ truyền động có xu hướng mượt mà và, trong bộ điều khiển tỷ lệ, tỷ lệ thuận với độ lệch nhiệt độ tại cảm biến.
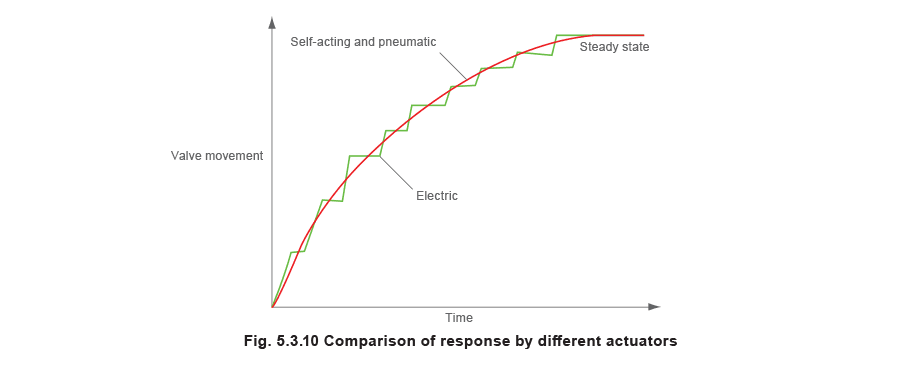
Với bộ truyền động điện có độ trễ do thời gian động cơ di chuyển cơ cấu điều khiển. Vì tín hiệu điều khiển là một chuỗi các xung, động cơ cung cấp các đợt chuyển động xen kẽ với các khoảng thời gian bộ truyền động đứng yên. Biểu đồ phản hồi (Hình 5.3.10) mô tả điều này. Tuy nhiên, do độ trễ trong phản hồi quá trình, nhiệt độ được kiểm soát cuối cùng vẫn có thể mượt mà.
Các hệ thống điều khiển đề cập trong chương này chỉ xem xét các điều kiện trạng thái ổn định. Tuy nhiên quá trình hoặc nhà máy đang được kiểm soát có thể bị ảnh hưởng bởi các biến đổi theo một mô hình hành vi nhất định. Hệ thống điều khiển được yêu cầu làm cho quá trình hoạt động theo cách có thể dự đoán được. Nếu quá trình thay đổi nhanh chóng, thì hệ thống điều khiển phải có khả năng phản ứng nhanh.
Nếu quá trình trải qua thay đổi chậm, các yêu cầu về tốc độ vận hành của hệ thống điều khiển không quá nghiêm ngặt. Nhiều tài liệu đã được ghi chép về hành vi tĩnh và động của bộ điều khiển và hệ thống điều khiển - độ nhạy, thời gian phản hồi, v.v. Có lẽ yếu tố quan trọng nhất cần xem xét là độ trễ thời gian của toàn bộ vòng lặp điều khiển. Động lực học của quá trình cần được xem xét để chọn đúng loại bộ điều khiển, cảm biến và bộ truyền động.
Phản ứng của quá trình
Phản ứng của quá trình
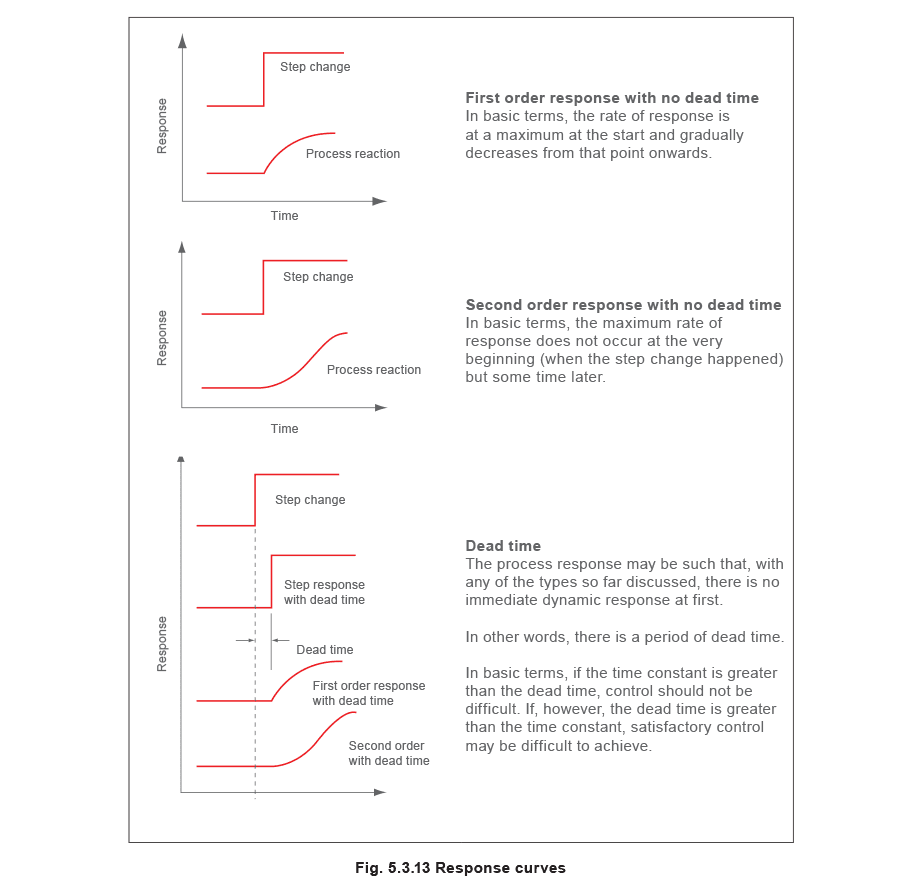
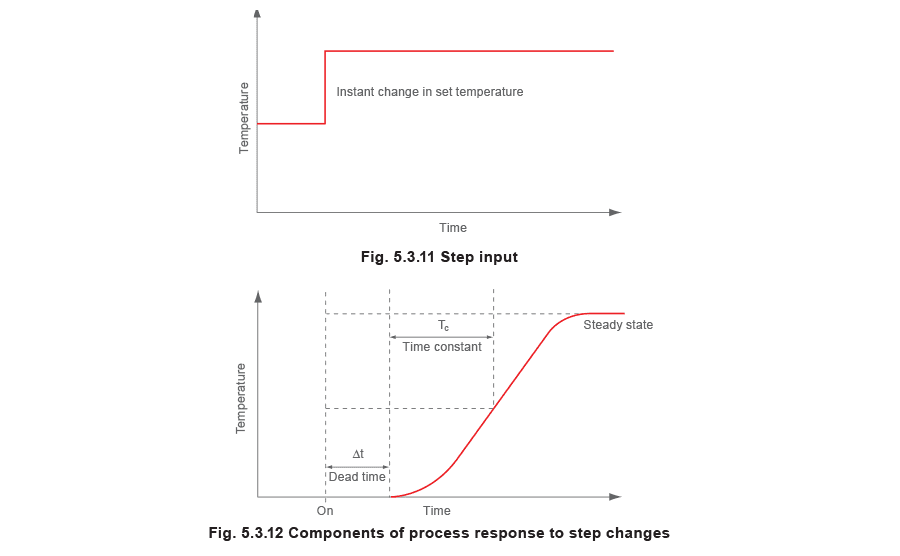
Các đặc tính động này được xác định bởi phản ứng của quá trình đối với sự thay đổi đột ngột trong cài đặt điều khiển, được gọi là đầu vào bước. Điều này có thể bao gồm sự thay đổi tức thì về nhiệt độ đặt, như trong Hình 5.3.11. Phản hồi của hệ thống được mô tả trong Hình 5.3.12, cho thấy một khoảng thời gian chết trước khi nhiệt độ quá trình bắt đầu tăng. Thời gian chết này là do độ trễ điều khiển gây ra bởi những thứ như bộ truyền động điện di chuyển đến vị trí mới. Hằng số thời gian sẽ khác nhau tùy theo phản hồi động của hệ thống, bị ảnh hưởng bởi những thứ như cảm biến có được đặt trong ống bảo hộ hay không.
Phản hồi của bất kỳ hai quá trình nào có thể có đặc tính khác nhau do hệ thống.
Ảnh hưởng của thời gian chết và hằng số thời gian đến phản hồi của hệ thống đối với sự thay đổi đầu vào đột ngột được thể hiện bằng đồ thị trong Hình 5.3.12. Các hệ thống có tốc độ phản hồi ban đầu nhanh đối với thay đổi đầu vào thường được gọi là có phản hồi bậc một. Các hệ thống có tốc độ phản hồi ban đầu chậm đối với thay đổi đầu vào thường được gọi là có phản hồi bậc hai. Tổng quan về các loại phản hồi quá trình cơ bản (ảnh hưởng của thời gian chết, phản hồi bậc một, và phản hồi bậc hai) được thể hiện trong Hình 5.3.13.