คำแนะนำการติดตั้งและทดสอบเดินเครื่องที่ใช้ได้จริงสำหรับวาล์ว แอคทูเอเตอร์ เซ็นเซอร์ ตัวควบคุม และอื่นๆ
วาล์ว
วาล์ว
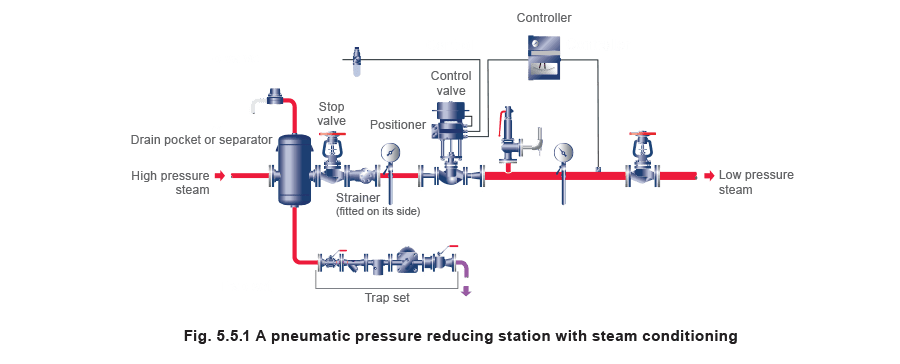
ก่อนติดตั้งวาล์วควบคุม จำเป็นต้องแน่ใจว่าขนาด แรงดันกำหนด วัสดุ และการเชื่อมต่อปลายเหมาะสมสำหรับสภาวะที่วาล์วคาดว่าจะทำงาน ผู้ผลิตอุปกรณ์ควบคุมอัตโนมัติที่มีชื่อเสียงทั้งหมดจะให้คำแนะนำโดยละเอียดเกี่ยวกับขั้นตอนการติดตั้งที่ถูกต้องสำหรับอุปกรณ์ของพวกเขา ข้อมูลยังจะให้เกี่ยวกับวิธีการตั้งค่าอุปกรณ์ รวมถึงการบำรุงรักษาประจำและปกติที่ต้องดำเนินการ ในกรณีส่วนใหญ่ ผู้ผลิตจะเสนอบริการทดสอบเดินเครื่องในสถานที่ด้วย ในบางกรณี อาจตกลงสัญญาการบำรุงรักษาหลังการขายเป็นประจำ โมดูล 5.5 ครอบคลุมประเด็นหลักที่ต้องพิจารณาก่อนการติดตั้ง ท่อต้นน้ำและท้ายน้ำของวาล์วควบคุมควรชัดเจนและไม่มีสิ่งกีดขวาง การทำงานที่ถูกต้องของวาล์วจะถูกกระทบหากถูกแรงบิดเบี้ยวจากท่อ สิ่งสำคัญคือต้องแน่ใจว่าข้อต่อหน้าแปลนทั้งหมดเป็นสี่เหลี่ยมและตรง และท่อได้รับการรองรับอย่างเพียงพอ วาล์วควบคุมโดยทั่วไปควรติดตั้งในท่อแนวนอนโดย spindle แนวตั้ง ระบบมักจะถูกทดสอบแรงดันก่อนใช้งาน การทดสอบนี้อาจดำเนินการที่แรงดันสูงกว่าสภาวะทำงานปกติ จำเป็นต้องแน่ใจว่าวาล์วควบคุมและส่วนภายในออกแบบมาเพื่อทนต่อแรงดันทดสอบที่สูงกว่านี้ วาล์วควบคุมเป็นเครื่องมือโดยพื้นฐานและจะเสียหายหากสิ่งสกปรกหรือวัสดุกัดกร่อนหรือสิ่งกีดขวางอื่นๆ เข้าไป จำเป็นในกรณีส่วนใหญ่ที่จะป้องกันสิ่งนี้โดยติดตั้ง strainer ในท่อต้นน้ำของวาล์วควบคุมใดๆ วาล์วต้องสามารถเข้าถึงได้สำหรับการบำรุงรักษาประจำ เช่น การ repacking glands และการเปลี่ยนส่วนภายใน เพื่ออำนวยความสะดวกงานประเภทนี้ วาล์ว isolation แบบ full bore pattern ทั้งสองด้านของวาล์วจะรักษาเวลาหยุดทำงานของโรงงานให้ minimum ในขณะที่งานดำเนินการ หากโรงงานต้องทำงานตลอดเวลา แม้ในขณะที่วาล์วควบคุมกำลังตรวจสอบหรือบำรุงรักษา อาจจำเป็นต้องติดตั้งวาล์ว bypass อย่างไรก็ตาม วาล์วที่ใช้ใน bypass ต้องมีคุณภาพดีและควรเป็นวาล์ว throttle ที่มีลักษณะเฉพาะหรือวาล์วควบคุมอีกตัวที่มี Kvs ที่ถูกต้อง การรั่วไหลผ่านมันในระหว่างการทำงานปกติจะส่งผลต่อการทำงานของระบบควบคุม ไม่แนะนำให้ติดตั้ง bypass แบบ manual ในทุกกรณี วาล์วควบคุมต้องติดตั้งเพื่อให้แน่ใจว่าทิศทางการไหลของตัวกลางที่ผ่านวาล์วถูกต้อง โดยปกติ ‘ลูกศรทิศทางการไหล’ ถูกหล่อเข้าไปในตัววาล์วควบคุม วาล์วต้องมีความสามารถในการไหลที่เหมาะสมและเกิดแรงดันลดที่ยอมรับได้ ในท่อไอน้ำ สิ่งสำคัญคือต้องจัดให้มี separator ไอน้ำและ/หรือจุดระบายน้ำต้นน้ำของวาล์ว ตามที่แสดงในรูปที่ 5.5.1 นี่จะป้องกันการ carryover ของคอนเดนเสทผ่านวาล์วควบคุม ซึ่งมิฉะนั้นจะลดอายุการใช้งาน จุดระบายนี้ยังสำคัญหากวาล์วควบคุมมีแนวโน้มที่จะปิดเป็นเวลานาน หากไม่ติดตั้งจุดระบายน้ำ อาจเกิด waterhammer และความเสียหายร้ายแรงเมื่อวาล์วเปิด การจัดให้มี separator ไอน้ำและ strainer ทำให้มั่นใจว่ามีการ condition ไอน้ำที่ดี
แอคทูเอเตอร์/เซ็นเซอร์
แอคทูเอเตอร์/เซ็นเซอร์
อีกครั้ง ต้องปฏิบัติตามคำแนะนำของผู้ผลิต แอคทูเอเตอร์มักติดตั้งแนวตั้งเหนือวาล์วควบคุม แม้ว่าอาจแนะนำ arrangements ที่แตกต่างกันหากแอคทูเอเตอร์ไฟฟ้าติดตั้งกับวาล์วที่จัดการตัวกลางอุณหภูมิสูง เช่น ไอน้ำ โดยทั่วไป แอคทูเอเตอร์ควร located ห่างจากสภาวะ เช่น ความร้อนส่วนเกิน ความชื้นสูง หรือไอกัดกร่อน สิ่งเหล่านี้มีแนวโน้มที่จะทำให้เกิดความล้มเหลวก่อนเวลาในส่วนประกอบ เช่น diaphragms หรือ items ไฟฟ้า/อิเล็กทรอนิกส์ ผู้ผลิตควรระบุสภาวะอุณหภูมิแวดล้อมสูงสุดที่แนะนำสำหรับอุปกรณ์ของตน ด้วยแอคทูเอเตอร์ไฟฟ้าบางตัว หากมีแนวโน้มเกิด condensation ภายในแอคทูเอเตอร์ มีรุ่นที่มีเครื่องทำความร้อนในตัว ในสถานที่ที่ไม่สามารถหลีกเลี่ยงสภาวะดังกล่าว ควรซื้อแอคทูเอเตอร์ที่เหมาะสมกับสภาวะที่ติดตั้ง Enclosures สำหรับแอคทูเอเตอร์ ตัวกำหนดตำแหน่ง เป็นต้น มักจะมี enclosure rating ที่สอดคล้องกับ code ไฟฟ้าแห่งชาติ ควรระบุระดับภูมิคุ้มกันของกล่องต่อการเข้ามาของฝุ่นและน้ำ ไม่มีประโยชน์ในการใช้แอคทูเอเตอร์ไฟฟ้าที่ enclosure มี rating ต่ำต่อการเข้ามาของน้ำ หากมีแนวโน้มที่จะถูกฉีดน้ำ! ต้องระมัดระวังเพื่อให้แน่ใจว่าเซ็นเซอร์ถูกจุ่มอย่างเต็มที่และถูกต้องหากต้องทำงาน sensing อย่างมีประสิทธิภาพ การใช้ pockets จะช่วยให้ตรวจสอบหรือเปลี่ยนได้โดยไม่ต้องระบายน้ำจากระบบท่อ ภาชนะ หรือโรงงานกระบวนการ ในทางตรงกันข้าม pockets จะหน่วงเวลาตอบสนอง การใช้ paste นำความร้อนใน pocket จะ minimize ความล่าช้าในการตอบสนอง
สายไฟและสัญญาณ
สายไฟและสัญญาณ
ด้วยระบบนิวเมติก สายอากาศอัดและสายสัญญาณนิวเมติกต้องแห้ง ปราศจากน้ำมันและสิ่งสกปรก และป้องกันการรั่ว การ locating ตัวควบคุมนิวเมติกใกล้วาล์วและแอคทูเอเตอร์จะ minimize ความล่าช้าเนื่องจากความจุและความต้านทานของสายสัญญาณ โดยปกติ วาล์ว แอคทูเอเตอร์ และตัวกำหนดตำแหน่งหรือตัวแปลง จะถูกจัดหาเป็นหน่วยประกอบสำเร็จรูป หากไม่ แอคทูเอเตอร์จะต้องติดตั้งกับวาล์ว และตัวกำหนดตำแหน่ง (สำหรับการควบคุมนิวเมติก) กับแอคทูเอเตอร์ จากนั้นชุดประกอบจะต้องตั้งค่าอย่างถูกต้อง เพื่อให้แน่ใจว่าได้ stroke วาล์วที่ถูกต้อง ฯลฯ ตามคำแนะนำของผู้ผลิต
สายไฟสำหรับการควบคุมไฟฟ้า/อิเล็กทรอนิกส์และไฟฟ้า-นิวเมติก
หลายครั้ง ปัญหา ‘การควบคุม’ ที่ดูเหมือนหลายอย่างถูกสืบย้อนไปถึงสายไฟที่ไม่ถูกต้อง ยกตัวอย่างปัญหา obvious ที่พบเป็นตัวอย่างสุดขั้ว การเชื่อมต่อแหล่งจ่าย 110 V กับมอเตอร์ที่กำหนด 24 V จะทำให้เกิดความเสียหาย! ต้องระมัดระวังกับระบบสายไฟ ตามคำแนะนำของผู้ผลิต และ subject to ระเบียบข้อบังคับท้องถิ่น ‘Noise’ หรือการรบกวนไฟฟ้าในระบบไฟฟ้ามักพบ ทำให้เกิดปัญหาการดำเนินงานที่ยากต่อการวินิจฉัย อาจจำเป็นต้องใช้สายเคเบิล screened ท่อ earth แยก หรือตัวควบคุมแบบควบคุมด้วยตัวเองหรือ analog สายเคเบิลควรได้รับการป้องกันจากความเสียหายทางกล
ตัวควบคุม
ตัวควบคุม
ดังที่กล่าวถึงก่อนหน้า การใช้งานโดยทั่วไปจะสร้างการเปลี่ยนแปลงที่ช้ากว่าเวลาตอบสนองของระบบควบคุม นี่คือเหตุผลที่พารามิเตอร์ของตัวควบคุม แบนด์สัดส่วนหรือเกน เวลาอินทีกรัล และเวลาอนุพันธ์ ต้อง tuned ให้เหมาะกับแต่ละการใช้งาน/งานเฉพาะ มีวิธีหลายวิธีในการปรับพารามิเตอร์ตัวควบคุม ส่วนใหญ่ involving การใช้คณิตศาสตร์ พฤติกรรมของลูปควบคุมสามารถ predicted ทางคณิตศาสตร์ แต่ลักษณะเฉพาะของกระบวนการหรือการใช้งานมักถูกกำหนดโดยการวัดเชิงประจักษ์ ซึ่งอาจเป็นเรื่องยาก วิธีที่ based on อัตราส่วนการถ่ายเทความร้อนในการออกแบบสามารถพบได้ แต่อยู่นอกเหนือขอบเขตของโมดูลนี้ ก่อนตั้งค่าพารามิเตอร์การควบคุม เป็นประโยชน์ที่จะทบทวนแต่ละเงื่อนไขการควบคุม (P, I และ D) และสามตัวเลือก regarding การตั้งค่า ตัวอย่างเช่น กว้างเกินไป แคบเกินไป และถูกต้อง
P-band (รูปที่ 5.5.2)
P-band (รูปที่ 5.5.2)
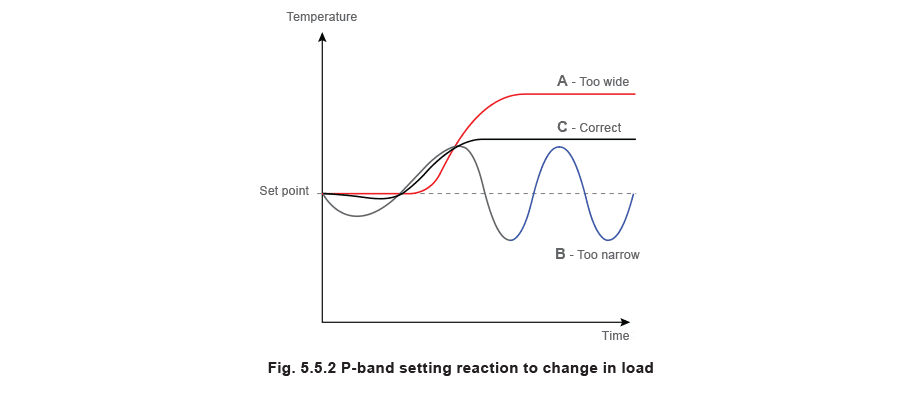
หาก P-band กว้างเกินไป ออฟเซ็ตขนาดใหญ่จะเกิดขึ้น แต่ระบบมีเสถียรภาพมาก (เส้นโค้ง A) การแคบ P-band จะลดออฟเซ็ต P-band แคบเกินไปจะทำให้เกิดความไม่มีเสถียรภาพและการแกว่ง (เส้นโค้ง B) P-band ที่เหมาะสม เส้นโค้ง C ทำได้ที่การตั้งค่าแค่กว้างกว่าเล็กน้อยที่ causing การแกว่งถาวร
สรุป P-band (การกระทำสัดส่วน)
P-band ที่ถูกต้อง = เสถียรภาพดี การตอบสนองดี มีออฟเซ็ตบ้าง
P-band กว้างขึ้น = เสถียรภาพดีกว่า การตอบสนองช้ากว่า ออฟเซ็ตใหญ่ขึ้น
P-band เล็กลง = ไม่มีเสถียรภาพ การตอบสนองเร็วขึ้น ออฟเซ็ตเล็กลงพร้อมการแกว่ง
การกระทำอินทีกรัล (รูปที่ 5.5.3)
การกระทำอินทีกรัล (รูปที่ 5.5.3)
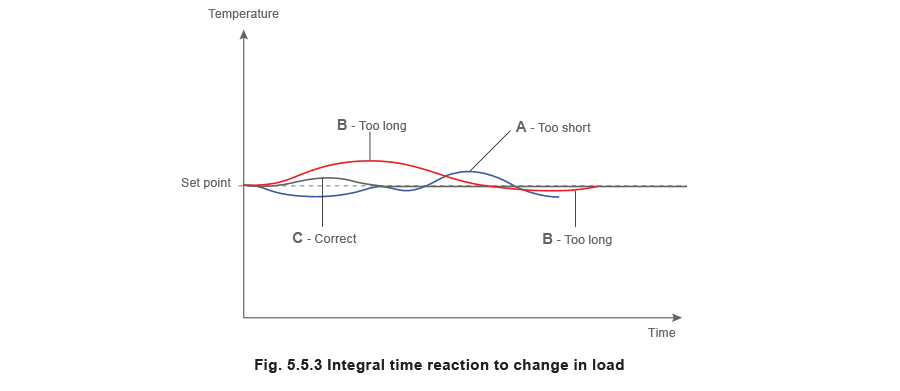
ด้วยเวลาอินทีกรัลสั้นเกินไป อุณหภูมิ (เส้นโค้ง A) จะข้ามจุดตั้งและจะเกิดการแกว่งบ้าง เวลาอินทีกรัลที่มากเกินไปจะทำให้อุณหภูมิใช้เวลานานเกินไปในการกลับสู่จุดตั้ง (เส้นโค้ง B) เส้นโค้ง C แสดงการตั้งค่าเวลาอินทีกรัลที่ถูกต้องที่อุณหภูมิกลับสู่จุดตั้งเร็วที่สุดเท่าที่จะทำได้โดยไม่มี overshoot หรือการแกว่ง
| สรุปการกระทำอินทีกรัล | ||
| IAT ที่ถูกต้อง = | กำจัดออฟเซ็ต | เสถียร - ไม่มี overshoot |
| IAT สั้นเกินไป = | กำจัดออฟเซ็ต | การตอบสนองเร็วเกินไป ทำให้ไม่มีเสถียรภาพและ overshoot |
| IAT ยาวเกินไป = | กำจัดออฟเซ็ต | การตอบสนองช้า เสถียร ไม่มี overshoot |
การกระทำอนุพันธ์ (รูปที่ 5.5.4)
การกระทำอนุพันธ์ (รูปที่ 5.5.4)
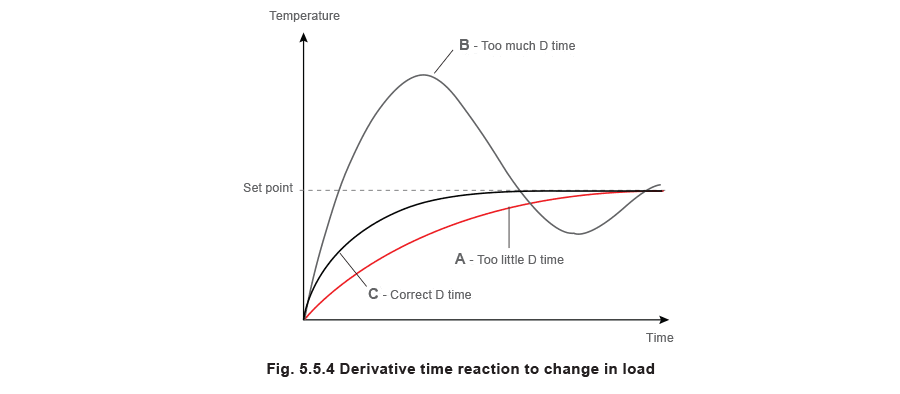
เวลาอนุพันธ์ที่มากเกินไปจะทำให้เกิดการเปลี่ยนแปลงอุณหภูมิเร็วเกินไป overshoot และการแกว่ง (เส้นโค้ง B) เวลาอนุพันธ์สั้นเกินไปอนุญาตให้อุณหภูมิเบี่ยงเบนจากจุดตั้งนานเกินไป (เส้นโค้ง A) การตั้งค่าที่เหมาะสมทำให้อุณหภูมิกลับสู่จุดตั้งเร็วที่สุดเท่าที่จะทำได้และสอดคล้องกับเสถียรภาพที่ดี (เส้นโค้ง C)
| สรุปการกระทำอนุพันธ์ | |
| เวลาอนุพันธ์ที่ถูกต้อง = | การตอบสนองเร็ว เสถียร |
| D time มากเกินไป = | การตอบสนองเร็วขึ้น leading to overshoot และไม่มีเสถียรภาพ |
| D time น้อยเกินไป = | การตอบสนองช้าลง |
วิธีการตั้งค่าตัวควบคุมที่ใช้ได้จริง
วิธีการตั้งค่าตัวควบคุมที่ใช้ได้จริง
ตัวควบคุมแต่ละตัวต้องตั้งค่าเป็นรายบุคคลเพื่อให้ตรงกับลักษณะเฉพาะของระบบเฉพาะ แม้ว่าจะมีเทคนิคที่แตกต่างกันหลายวิธีที่สามารถให้การควบคุมที่มีเสถียรภาพและเร็ว วิธี Ziegler-Nicholls ได้พิสูจน์ว่ามีประสิทธิภาพมาก
วิธี Ziegler-Nicholls
วิธี Ziegler-Nicholls
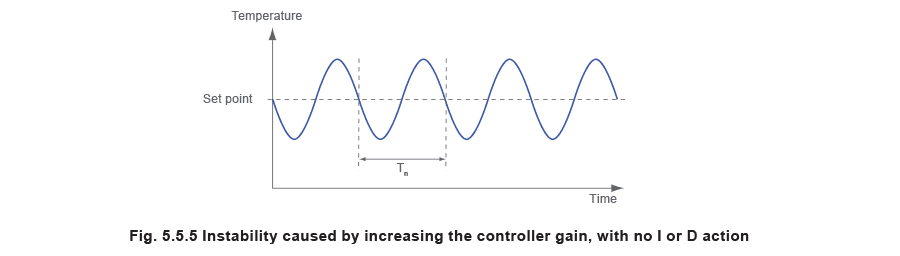
วิธี Ziegler-Nicholls frequency response (บางครั้งเรียกว่าวิธี critical oscillation) มีประสิทธิภาพมากในการกำหนดการตั้งค่าตัวควบคุมสำหรับโหลดจริง วิธีนี้ใช้ตัวควบคุมเป็น amplifier เพื่อไปถึงจุดไม่มีเสถียรภาพ ณ จุดนี้ระบบทั้งหมดทำงานในลักษณะที่อุณหภูมิ fluctuates around จุดตั้งด้วย amplitude คงที่ (ดูรูปที่ 5.5.5) การเพิ่มเกนเล็กน้อย หรือลด P-band จะทำให้ระบบไม่มีเสถียรภาพ และวาล์วควบคุมจะเริ่ม hunting ด้วย amplitude ที่เพิ่มขึ้น ในทางกลับกัน P-band ที่เพิ่มขึ้นจะทำให้กระบวนการมีเสถียรภาพมากขึ้นและ amplitude จะถูกลดลงอย่างต่อเนื่อง ณ จุดไม่มีเสถียรภาพ ลักษณะเฉพาะของระบบถูก obtain สำหรับสภาวะการทำงานจริง รวมถึงเครื่องแลกเปลี่ยนความร้อน วาล์วควบคุม แอคทูเอเตอร์ ท่อ และเซ็นเซอร์อุณหภูมิ การตั้งค่าตัวควบคุมสามารถกำหนดผ่านวิธี Ziegler-Nicholls โดยอ่านช่วงเวลา (Tn) ของวัฏจักรอุณหภูมิ; และการตั้งค่า P-band จริงที่จุดไม่มีเสถียรภาพ
ขั้นตอนสำหรับการเลือกการตั้งค่าพารามิเตอร์ PID โดยใช้วิธี Ziegler-Nicholls เป็นดังนี้:
- ลบการกระทำอินทีกรัลบนตัวควบคุมโดยเพิ่มเวลาอินทีกรัล (Ti) ให้สูงสุด
- ลบการกระทำอนุพันธ์ของตัวควบคุมโดยตั้งค่าเวลาอนุพันธ์ (TD) เป็น 0
- รอจนกว่ากระบวนการถึงสภาวะเสถียร
- ลด P-band (เพิ่มเกน) จนถึงจุดไม่มีเสถียรภาพ
- วัดเวลาสำหรับหนึ่งรอบ (Tn) และ register การตั้งค่า P-band จริงบนตัวควบคุมที่จุดนี้
- โดยใช้การตั้งค่านี้เป็นจุดเริ่มต้น คำนวณการตั้งค่าตัวควบคุมที่เหมาะสมตามค่าในรูปที่ 5.5.6
รูปที่ 5.5.6 การคำนวณ Ziegler-Nicholls
รูปที่ 5.5.6 การคำนวณ Ziegler-Nicholls
| แบนด์สัดส่วน | เวลาอินทีกรัล | เวลาอนุพันธ์ | |
|---|---|---|---|
| การควบคุม P I D | P-band x 1.7 | Tn/2 | Tn/8 |
| การควบคุม P I | P-band x 2.2 | Tn/1.2 | |
| การควบคุม P | P-band x 2.0 |
การตั้งค่าตัวควบคุมอาจปรับเพิ่มเติมเพื่อเพิ่มเสถียรภาพหรือการตอบสนอง ผลกระทบของการเปลี่ยนการตั้งค่าพารามิเตอร์ PID ต่อเสถียรภาพ และการตอบสนองของการควบคุม แสดงในรูปที่ 5.5.7
รูปที่ 5.5.7 ผลของการเปลี่ยนการตั้งค่า PID
รูปที่ 5.5.7 ผลของการเปลี่ยนการตั้งค่า PID
| เสถียรภาพ | การตอบสนอง | |
| เพิ่ม P Band | เพิ่มขึ้น | ช้าลง |
| เพิ่ม Ti | เพิ่มขึ้น | ช้าลง |
| เพิ่ม TD | ลดลง | เร็วขึ้น |
การโอนย้ายโดยไม่กระทบ
การโอนย้ายโดยไม่กระทบ
ข้อกำหนดทางเทคนิคสำหรับตัวควบคุมรวมถึงคำศัพท์อื่นๆ มากมาย และคำที่พบบ่อยคือ ‘bumpless transfer’ ตัวควบคุมส่วนใหญ่รวมสวิตช์ ‘Manual’ – ‘Auto’ และอาจมีบางครั้งที่สถานการณ์การควบคุมบางอย่างต้องการการควบคุมด้วยมือ ทำให้การขัดจังหวะลูปควบคุมอัตโนมัติจำเป็น หากไม่มี bumpless transfer การโอนย้ายจาก Auto ไป Manual และกลับกันจะหมายความว่าระดับการควบคุมจะสูญหาย เว้นแต่เอาท์พุต manual จับคู่กับเอาท์พุตอัตโนมัติ Bumpless transfer ทำให้มั่นใจว่าเอาท์พุต - ไม่ว่าจะ Manual ไป Auto หรือ Auto ไป Manual - จับคู่กัน และจำเป็นเพียงเคลื่อนสวิตช์ตามความเหมาะสม
ตัวควบคุม self-tuning
ตัวควบคุม self-tuning
ไมโครโปรเซสเซอร์สมัยใหม่ให้ความสามารถสำหรับฟังก์ชันบางอย่าง ที่ก่อนหน้าต้องการคอมพิวเตอร์ ถูก packed ในพื้นที่จำกัดของตัวควบคุม ท่ามกลางสิ่งเหล่านี้ คือความสามารถในการ ‘self-tune’ ตัวควบคุมที่ไม่ต้องการวิศวกรทดสอบเดินเครื่องผ่านกระบวนการตั้งค่าเงื่อนไข P I D อีกต่อไป มีให้ใช้มาหลายปีแล้ว ตัวควบคุม self-tune สลับไปควบคุมเปิด/ปิดเป็นระยะเวลาหนึ่ง ในช่วงเวลานี้วิเคราะห์ผลลัพธ์ของการตอบสนอง และคำนวณและตั้งค่าเงื่อนไข P I D ของตัวเอง เคยเป็นกรณีที่ฟังก์ชัน self-tune สามารถใช้ได้เฉพาะในระหว่างการเริ่มต้นระบบ; เมื่อตั้งค่าโดยตัวควบคุมแล้ว เงื่อนไข P I D จะคงที่โดยไม่คำนึงถึงการเปลี่ยนแปลงใดๆ ในกระบวนการที่ตามมา ตัวควบคุมสมัยใหม่สามารถทำงานที่เรียกว่าฟังก์ชัน adaptive ซึ่งไม่เพียงตั้งค่าเงื่อนไข P I D เริ่มต้นที่ต้องการ แต่ monitor และ reset เงื่อนไขเหล่านี้หากจำเป็น ตามการเปลี่ยนแปลงในกระบวนการในระหว่างสภาวะการทำงานปกติ ตัวควบคุมดังกล่าวพร้อมใช้งานและค่อนข้างราคาไม่แพง การใช้งานของพวกเขากำลังแพร่หลายมากขึ้น แม้สำหรับงานควบคุมที่ค่อนข้างไม่ซับซ้อน