คำอธิบายเกี่ยวกับแต่ละองค์ประกอบของระบบควบคุม รวมถึงวาล์ว แอคทูเอเตอร์ เซ็นเซอร์ และตัวควบคุม; พร้อมด้วยคำแนะนำเกี่ยวกับวิธีการควบคุมและพลศาสตร์ของระบบ รวมถึงลูปควบคุมแบบง่ายและระบบป้อนกลับ
ลูปควบคุมคืออะไร?
ลูปควบคุมคืออะไร?
โมดูลนี้แนะนำการอภิปรายเกี่ยวกับระบบควบคุมที่สมบูรณ์ ประกอบด้วยวาล์ว แอคทูเอเตอร์ เซ็นเซอร์ ตัวควบคุม และพลศาสตร์ของกระบวนการเอง ลูปควบคุม
ระบบควบคุมวงจรเปิด
การควบคุมวงจรเปิดหมายความง่ายๆ ว่าไม่มีป้อนกลับโดยตรงจากสภาวะที่ถูกควบคุม; กล่าวอีกนัยหนึ่ง ไม่มีข้อมูลถูกส่งกลับจากกระบวนการหรือระบบที่กำลังถูกควบคุมเพื่อแจ้งตัวควบคุมว่าจำเป็นต้องมีการกระทำแก้ไข ระบบทำความร้อนที่แสดงในรูปที่ 5.3.1 แสดงสิ่งนี้โดยใช้เซ็นเซอร์ภายนอกห้องที่กำลังให้ความร้อน ระบบที่แสดงในรูปที่ 5.3.1 ไม่ใช่ตัวอย่างของระบบควบคุมความร้อนที่ใช้ได้จริง; เป็นเพียงการใช้เพื่อแสดงหลักการของการควบคุมวงจรเปิด
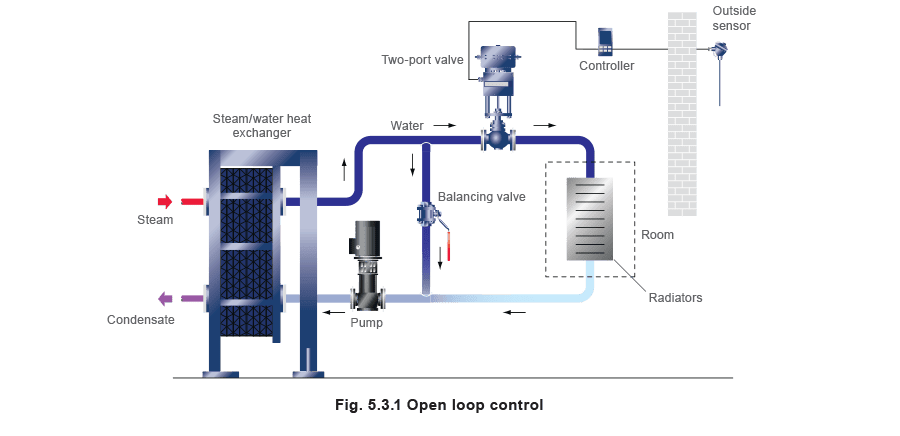
ระบบประกอบด้วยตัวควบคุมแบบสัดส่วนพร้อมเซ็นเซอร์ภายนอกที่ตรวจจับอุณหภูมิอากาศโดยรอบ ตัวควบคุมอาจถูกตั้งค่าด้วยแบนด์สัดส่วนค่อนข้างกว้าง ดังนั้นที่อุณหภูมิโดยรอบ -1°C วาล์วจะเปิดเต็มที่ และที่อุณหภูมิโดยรอบ 19°C วาล์วจะปิดเต็มที่ เนื่องจากอุณหภูมิโดยรอบจะมีผลต่อการสูญเสียความร้อนจากอาคาร จึงหวังว่าอุณหภูมิห้องจะถูกควบคุม
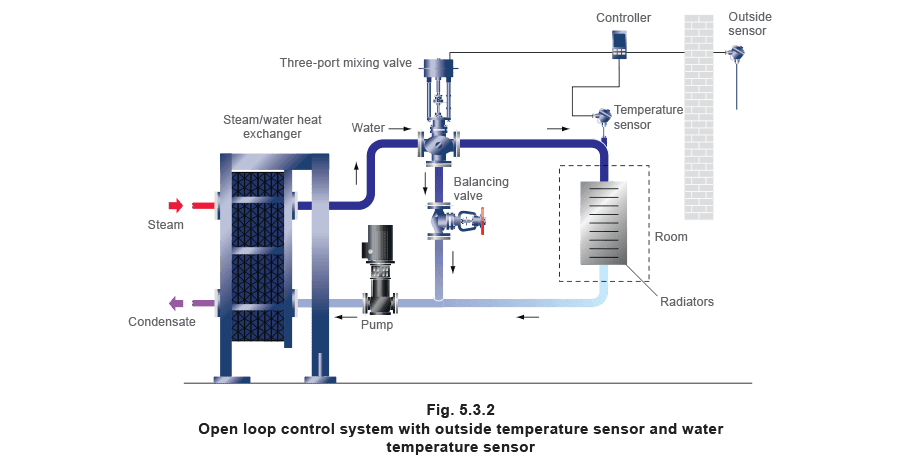
อย่างไรก็ตาม ไม่มีป้อนกลับเกี่ยวกับอุณหภูมิห้องและความร้อนเนื่องจากปัจจัยอื่นๆ ในสภาพอากาศอบอุ่น แม้ว่าการไหลของน้ำจะถูกควบคุม ปัจจัยอื่นๆ เช่น การรับพลังงานแสงอาทิตย์สูง อาจทำให้ห้องร้อนเกินไป กล่าวอีกนัยหนึ่ง การควบคุมแบบเปิดมักจะให้การควบคุมแบบหยาบสำหรับการใช้งานเท่านั้น รูปที่ 5.3.2 แสดงระบบควบคุมที่ซับซ้อนขึ้นเล็กน้อยพร้อมเซ็นเซอร์สองตัว
การควบคุมวงจรปิด
ระบบใช้วาล์วผสมสามทางพร้อมแอคทูเอเตอร์ ตัวควบคุม และเซ็นเซอร์อากาศภายนอก รวมถึงเซ็นเซอร์อุณหภูมิในสายน้ำ
เซ็นเซอร์อุณหภูมิภายนอกให้สัญญาณอินพุตจุดตั้งระยะไกลไปยังตัวควบคุม ซึ่งใช้เพื่อปรับค่าจุดตั้งอุณหภูมิน้ำ ในลักษณะนี้ การควบคุมวงจรปิดใช้กับอุณหภูมิน้ำที่ไหลผ่านหม้อน้ำ เมื่อข้างนอกหนาว น้ำจะไหลผ่านหม้อน้ำที่อุณหภูมิสูงสุด เมื่ออุณหภูมิภายนอกเพิ่มขึ้น ตัวควบคุมจะลดอุณหภูมิน้ำที่ไหลผ่านหม้อน้ำโดยอัตโนมัติ อย่างไรก็ตาม นี่ยังคงเป็นการควบคุมวงจรเปิดในแง่ของอุณหภูมิห้อง เนื่องจากไม่มีป้อนกลับจากอาคารหรือพื้นที่ที่กำลังให้ความร้อน หากหม้อน้ำมีขนาดใหญ่เกินไปหรือมีข้อผิดพลาดในการออกแบบ การร้อนเกินไปจะยังคงเกิดขึ้น
การควบคุมวงจรปิด
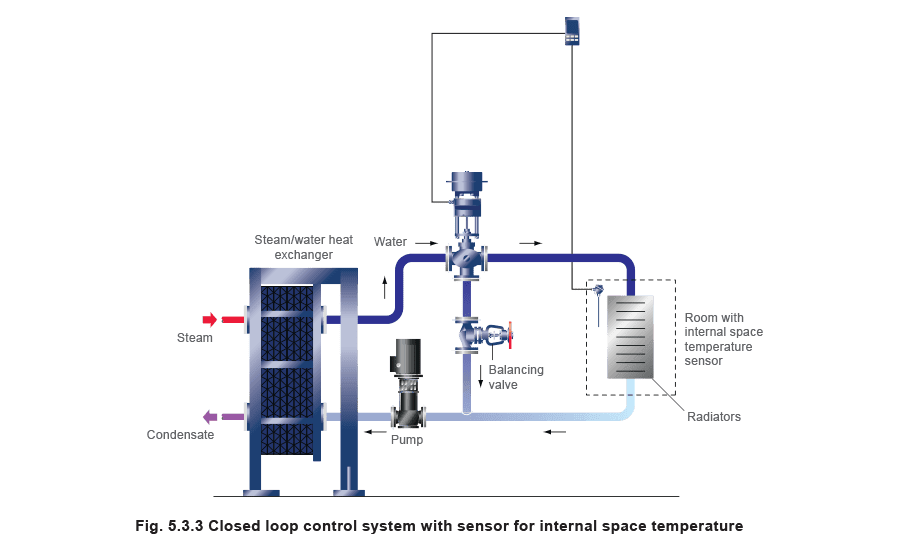
อย่างง่ายๆ การควบคุมวงจรปิดต้องการป้อนกลับ; ข้อมูลที่ส่งกลับโดยตรงจากกระบวนการหรือระบบ การใช้ระบบทำความร้อนแบบง่ายที่แสดงในรูปที่ 5.3.3 การเพิ่มเซ็นเซอร์อุณหภูมิพื้นที่ภายในจะตรวจจับอุณหภูมิห้องและให้การควบคุมวงจรปิดสำหรับห้อง ในรูปที่ 5.3.3 วาล์วและแอคทูเอเตอร์ถูกควบคุมผ่านเซ็นเซอร์อุณหภูมิพื้นที่ในห้อง ให้ป้อนกลับจากอุณหภูมิห้องจริง
การรบกวน
การรบกวน
การรบกวนคือปัจจัยที่เข้าสู่กระบวนการหรือระบบเพื่อทำลายค่าของตัวกลางที่ถูกควบคุม การรบกวนเหล่านี้อาจเกิดจากการเปลี่ยนแปลงโหลดหรืออิทธิพลจากภายนอก ตัวอย่างเช่น; หากในระบบทำความร้อนแบบง่าย ห้องถูกเติมด้วยผู้คนอย่างกะทันหัน นี่จะเป็นการรบกวน เนื่องจากจะส่งผลต่ออุณหภูมิห้องและปริมาณความร้อนที่ต้องการเพื่อรักษาอุณหภูมิพื้นที่ที่ต้องการ
การควบคุมป้อนกลับ
การควบคุมป้อนกลับ
นี่คือการควบคุมวงจรปิดอีกประเภทหนึ่ง การควบคุมป้อนกลับคำนึงถึงการรบกวนและป้อนข้อมูลนี้กลับไปยังตัวควบคุม เพื่ออนุญาตให้มีการกระทำแก้ไข ตัวอย่างเช่น หากมีผู้คนจำนวนมากเข้ามาในห้อง อุณหภูมิพื้นที่จะเพิ่มขึ้น ซึ่งจะทำให้ระบบควบคุมลดความร้อนที่ป้อนเข้าสู่ห้อง
การควบคุมป้อนหน้า
การควบคุมป้อนหน้า
ด้วยการควบคุมป้อนหน้า ผลกระทบของการรบกวนใดๆ ได้รับการคาดการณ์และคำนึงถึงก่อนที่เหตุการณ์จะเกิดขึ้นจริง ตัวอย่างของสิ่งนี้คือการเพิ่มหม้อไอน้ำให้ไฟแรงก่อนที่จะนำโรงงานกระบวนการผลิตที่ใช้ไอน้ำขนาดใหญ่เข้าสู่ระบบ ลำดับเหตุการณ์อาจเป็นว่าโรงงานกระบวนการผลิตถูกเปิด การกระทำนี้แทนที่จะเปิดวาล์วไอน้ำไปยังกระบวนการ จะสั่งเตาเผาไหม้ของหม้อไอน้ำให้ไฟแรง เฉพาะเมื่อถึงตำแหน่งไฟแรงแล้วเท่านั้นที่วาล์วไอน้ำกระบวนการจะได้รับอนุญาตให้เปิด และจากนั้นในลักษณะที่ช้าและมีการควบคุม
การควบคุมลูปเดี่ยว
การควบคุมลูปเดี่ยว
นี่คือลูปควบคุมที่ง่ายที่สุดที่เกี่ยวข้องกับตัวแปรที่ถูกควบคุมเพียงตัวเดียว ตัวอย่างเช่น อุณหภูมิ เพื่ออธิบายเรื่องนี้ พิจารณาเครื่องแลกเปลี่ยนความร้อนจากไอน้ำเป็นน้ำดังที่แสดงในรูปที่ 5.3.4
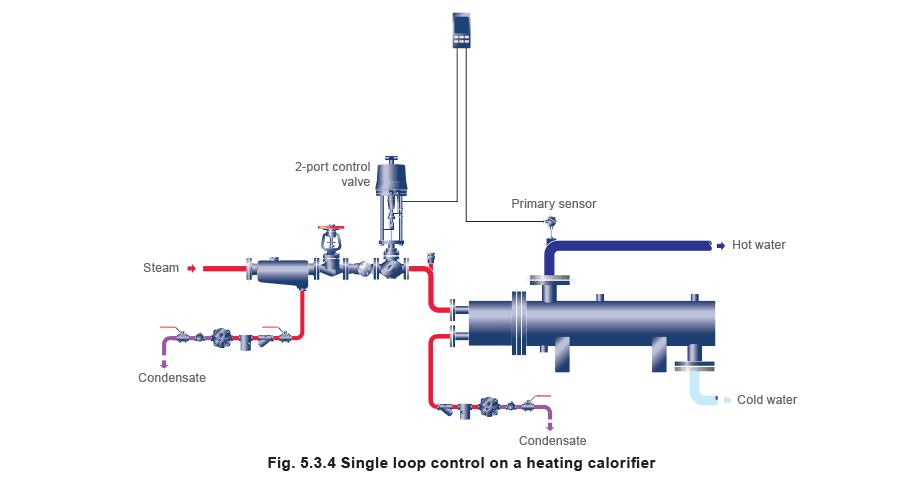
ตัวแปรเดียวที่ถูกควบคุมในรูปที่ 5.3.4 คืออุณหภูมิน้ำที่ออกจากเครื่องแลกเปลี่ยนความร้อน ทำได้โดยการควบคุมวาล์วไอน้ำสองทางที่จ่ายไอน้ำไปยังเครื่องแลกเปลี่ยนความร้อน เซ็นเซอร์หลักอาจเป็นเทอร์โมคัพเพิลหรือเทอร์โมมิเตอร์ความต้านทานแพลตินัม PT100 ที่ตรวจจับอุณหภูมิน้ำ
ตัวควบคุมเปรียบเทียบสัญญาณจากเซ็นเซอร์กับจุดตั้งบนตัวควบคุม หากมีความแตกต่าง ตัวควบคุมจะส่งสัญญาณไปยังแอคทูเอเตอร์ของวาล์ว ซึ่งเคลื่อนวาล์วไปยังตำแหน่งใหม่ ตัวควบคุมอาจรวมตัวบ่งชี้เอาท์พุตที่แสดงเปอร์เซ็นต์การเปิดวาล์วด้วย ลูปควบคุมเดี่ยวให้การควบคุมส่วนใหญ่สำหรับระบบทำความร้อนและกระบวนการผลิต คำอื่นๆ ที่ใช้สำหรับลูปควบคุมเดี่ยว ได้แก่:
- การควบคุมค่าที่ตั้ง
- การควบคุมวงจรปิดเดี่ยว
- การควบคุมป้อนกลับ
การควบคุมหลายลูป
การควบคุมหลายลูป
ตัวอย่างต่อไปนี้พิจารณาการใช้งานสำหรับผลิตภัณฑ์จากไม้ที่เคลื่อนที่ช้า ซึ่งต้องควบคุมให้ได้ระดับความชื้นเฉพาะ (ดูรูปที่ 5.3.5 และ 5.3.6)
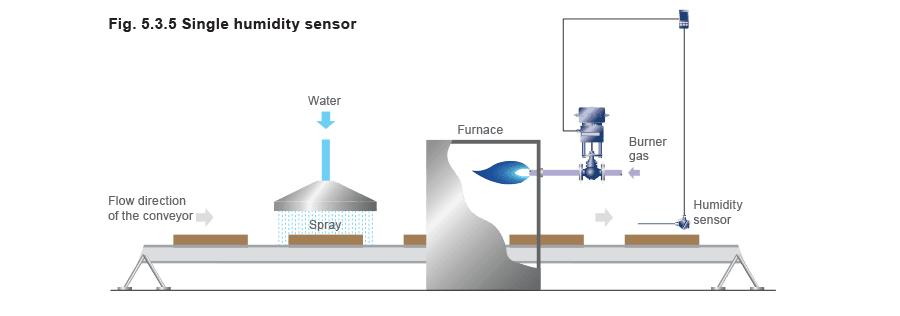
ในรูปที่ 5.3.5 เซ็นเซอร์ความชื้นเดี่ยวที่ปลายสายพานลำเลียงควบคุมปริมาณความร้อนที่เตาเพิ่มเข้ามา แต่หากอัตราการพ่นน้ำเปลี่ยนแปลง เช่น เนื่องจากความผันผวนของแรงดันน้ำ อาจใช้เวลาประมาณ 10 นาทีก่อนที่ผลิตภัณฑ์จะถึงปลายอีกด้านของสายพานลำเลียงและเซ็นเซอร์ความชื้นตอบสนอง นี่จะทำให้เกิดความผันผวนในคุณภาพผลิตภัณฑ์
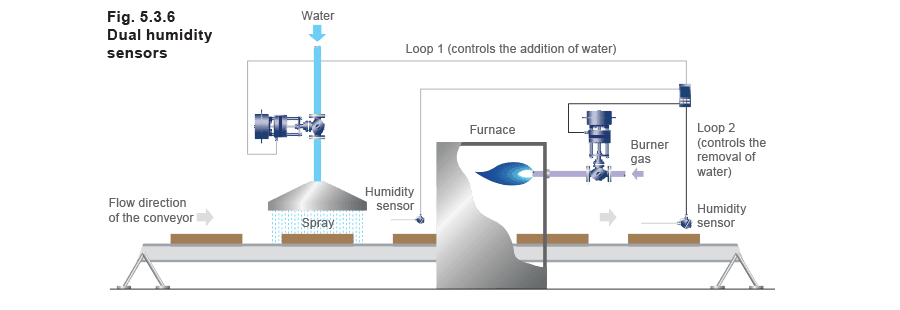
เพื่อปรับปรุงการควบคุม สามารถติดตั้งเซ็นเซอร์ความชื้นตัวที่สองบนลูปควบคุมอีกลูปหนึ่งได้ทันทีหลังจากจุดพ่นน้ำ ดังที่แสดงในรูปที่ 5.3.6 เซ็นเซอร์ความชื้นนี้ให้สัญญาณอินพุตจุดตั้งระยะไกลไปยังตัวควบคุมซึ่งใช้เพื่อปรับค่าจุดตั้งท้องถิ่น จุดตั้งท้องถิ่นถูกตั้งไว้ที่ความชื้นที่ต้องการหลังเตา นี่ในรูปแบบง่ายแสดงการควบคุมหลายลูป ระบบควบคุมความชื้นนี้ประกอบด้วยสองลูปควบคุม:
- ลูป 1 ควบคุมการเพิ่มน้ำ
- ลูป 2 ควบคุมการกำจัดน้ำ ภายในกระบวนการนี้ ปัจจัยจะมีอิทธิพลต่อทั้งสองลูป บางปัจจัย เช่น แรงดันน้ำ จะส่งผลต่อทั้งสองลูป ลูป 1 จะพยายามแก้ไขสำหรับสิ่งนี้ แต่ข้อผิดพลาดที่เกิดขึ้นจะมีผลกระทบต่อลูป 2
การควบคุมคาสเคด
การควบคุมคาสเคด
เมื่อตัวแปรอิสระสองตัวต้องถูกควบคุมด้วยวาล์วเดียว อาจใช้ระบบควบคุมคาสเคด รูปที่ 5.3.7 แสดงภาชนะหุ้มไอน้ำที่เต็มไปด้วยผลิตภัณฑ์เหลว แง่มุมที่สำคัญของกระบวนการค่อนข้างเข้มงวด:
- ผลิตภัณฑ์ในภาชนะต้องถูกทำให้ร้อนถึงอุณหภูมิที่กำหนด
- ไอน้ำต้องไม่เกินอุณหภูมิที่กำหนด มิฉะนั้นผลิตภัณฑ์อาจเสียหาย
- อุณหภูมิผลิตภัณฑ์ต้องไม่เพิ่มเร็วกว่าอัตราที่กำหนด มิฉะนั้นผลิตภัณฑ์อาจเสียหาย หากใช้การควบคุมลูปเดี่ยวปกติพร้อมเซ็นเซอร์ในของเหลว ที่จุดเริ่มต้นของกระบวนการ เซ็นเซอร์จะตรวจจับอุณหภูมิต่ำ และตัวควบคุมจะส่งสัญญาณให้วาล์วเคลื่อนไปยังตำแหน่งเปิดเต็มที่ นี่จะทำให้เกิดปัญหาจากอุณหภูมิไอน้ำที่สูงเกินไปในปลอกหุ้ม
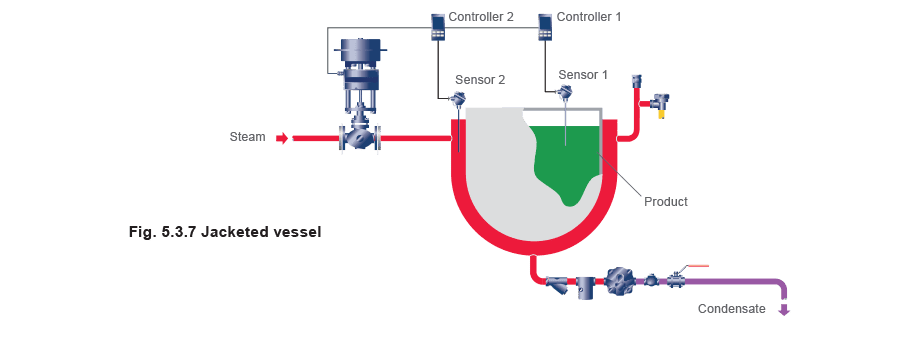
วิธีแก้ไขคือใช้การควบคุมคาสเคดที่ใช้ตัวควบคุมสองตัวและเซ็นเซอร์สองตัว:
- ตัวควบคุมรอง (ตัวควบคุม 2) และเซ็นเซอร์ที่ตรวจสอบอุณหภูมิไอน้ำในปลอกหุ้ม และส่งสัญญาณเอาท์พุตไปยังวาล์วควบคุม
- ตัวควบคุมหลัก (ตัวควบคุม 1) และเซ็นเซอร์ที่ตรวจสอบอุณหภูมิผลิตภัณฑ์ โดยสัญญาณเอาท์พุตของตัวควบคุมจะไปยังตัวควบคุมรอง
- สัญญาณเอาท์พุตจากตัวควบคุมหลักใช้เพื่อเปลี่ยนจุดตั้งในตัวควบคุมรอง เพื่อให้แน่ใจว่าอุณหภูมิไอน้ำไม่เกิน ตัวอย่าง 5.3.1 ตัวอย่างของการควบคุมคาสเคดที่ใช้กับภาชนะกระบวนการ อุณหภูมิของเหลวจะถูกทำให้ร้อนจาก 15°C เป็น 80°C และรักษาไว้ที่ 80°C เป็นเวลาสองชั่วโมง อุณหภูมิไอน้ำไม่สามารถเกิน 120°C ในทุกกรณี อุณหภูมิผลิตภัณฑ์ต้องไม่เพิ่มเร็วกว่า 1°C/นาที ตัวควบคุมหลักสามารถปรับ ramp ได้เพื่อให้อัตราการเพิ่มขึ้นของอุณหภูมิน้ำไม่สูงกว่าที่กำหนด ตัวควบคุมหลักถูกตั้งไว้ในโหมดกลับด้าน ดังนั้นสัญญาณเอาท์พุตไปยังตัวควบคุมรองคือ 20 mA ที่อุณหภูมิต่ำและ 4 mA ที่อุณหภูมิสูง จุดตั้งระยะไกลบนตัวควบคุมรองถูกตั้งไว้เพื่อให้สัญญาณเอาท์พุตไปยังวาล์วคือ 4 mA เมื่ออุณหภูมิไอน้ำ 80°C และ 20 mA เมื่ออุณหภูมิไอน้ำ 120°C ในลักษณะนี้ อุณหภูมิของไอน้ำไม่สามารถสูงกว่าที่ระบบยอมรับได้ และความดันไอน้ำในปลอกหุ้มไม่สามารถสูงกว่าความดันอิ่มตัว 1 bar g ที่ 120°C
พลศาสตร์ของกระบวนการ
พลศาสตร์ของกระบวนการ
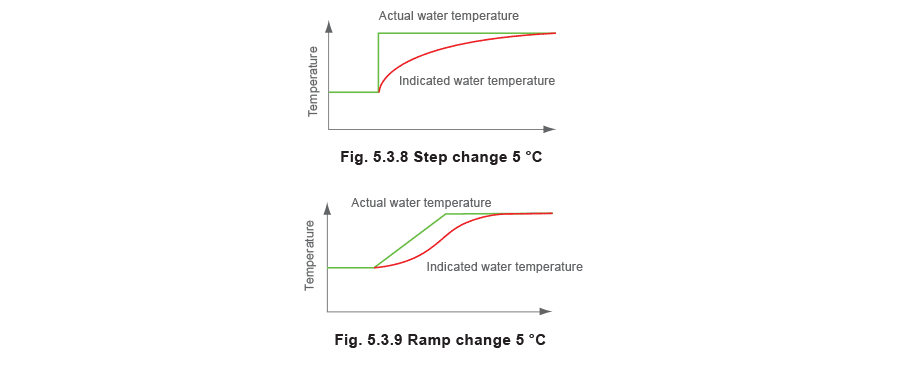
นี่เป็นเรื่องที่ซับซ้อนมาก แต่ส่วนนี้ของข้อความจะครอบคลุมข้อพิจารณาพื้นฐานที่สุด คำว่า ‘ค่าคงที่เวลา’ ซึ่งเกี่ยวกับคำจำกัดความของเวลาที่ใช้สำหรับการเคลื่อนที่ของแอคทูเอเตอร์ ได้ถูกสรุปไว้แล้วในโมดูล 5.1; แต่เพื่อย้ำอีกครั้ง คือเวลาที่ใช้สำหรับระบบควบคุมที่จะเข้าถึงประมาณสองในสามของการเคลื่อนที่ทั้งหมดอันเนื่องมาจากการเปลี่ยนแปลงขั้นตอนที่กำหนดในอุณหภูมิหรือตัวแปรอื่น ส่วนอื่นๆ ของระบบควบคุมจะมีการตอบสนองที่ขึ้นกับเวลาในลักษณะคล้ายกัน - ตัวควบคุมและส่วนประกอบต่างๆ และตัวเซ็นเซอร์เอง เครื่องมือทั้งหมดมีความล่าช้าเวลาระหว่างอินพุตของเครื่องมือและเอาท์พุตที่ตามมา แม้แต่ระบบส่งสัญญาณก็จะมีความล่าช้าเวลา - ไม่ใช่ปัญหาสำหรับระบบไฟฟ้า/อิเล็กทรอนิกส์ แต่เป็นปัจจัยที่อาจต้องคำนึงถึงสำหรับระบบส่งสัญญาณนิวเมติก รูปที่ 5.3.8 และ 5.3.9 แสดงความล่าช้าในการตอบสนองโดยทั่วไป สำหรับเทอร์โมคัพเพิลที่ติดตั้งในซองเพื่อตรวจจับอุณหภูมิน้ำ
นอกเหนือจากความล่าช้าในการตอบสนองของเซ็นเซอร์ ส่วนอื่นๆ ของระบบควบคุมยังส่งผลต่อเวลาตอบสนอง ด้วยระบบนิวเมติกและระบบควบคุมอัตโนมัติ การเคลื่อนที่ของวาล์ว/แอคทูเอเตอร์มักจะราบรื่น และในตัวควบคุมแบบสัดส่วน แปรผันโดยตรงกับการเบี่ยงเบนของอุณหภูมิที่เซ็นเซอร์
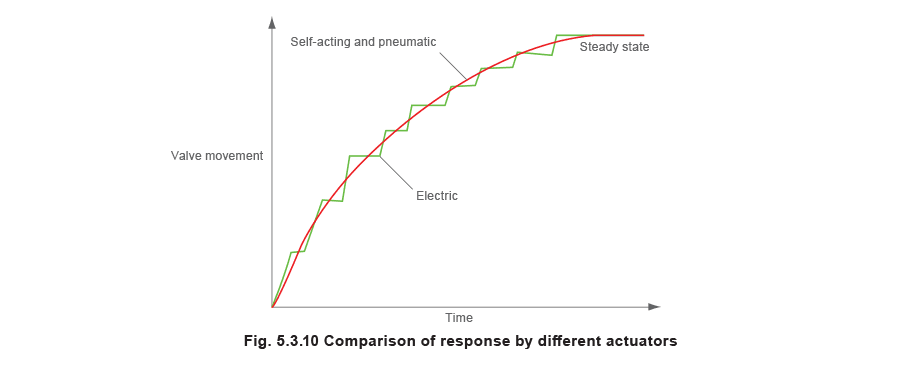
ด้วยแอคทูเอเตอร์ไฟฟ้า มีความล่าช้าเนื่องจากเวลาที่ใช้สำหรับมอเตอร์ที่จะเคลื่อนกลไกควบคุม เนื่องจากสัญญาณควบคุมเป็นชุดพัลส์ มอเตอร์จึงให้การเคลื่อนที่เป็นช่วงๆ ตามด้วยช่วงที่แอคทูเอเตอร์หยุดนิ่ง แผนภาพการตอบสนอง (รูปที่ 5.3.10) แสดงสิ่งนี้ อย่างไรก็ตาม เนื่องจากความล่าช้าในการตอบสนองของกระบวนการ อุณหภูมิที่ควบคุมขั้นสุดท้ายยังคงสามารถราบรื่นได้
ระบบควบคุมที่ครอบคลุมในโมดูลนี้ได้พิจารณาเฉพาะสภาวะคงตัวเท่านั้น อย่างไรก็ตาม กระบวนการหรือโรงงานที่กำลังถูกควบคุมอาจมีความผันผวนตามรูปแบบพฤติกรรมบางอย่าง ระบบควบคุมจำเป็นต้องทำให้กระบวนการประพฤติตนในลักษณะที่คาดการณ์ได้ หากกระบวนการเป็นประเภทที่เปลี่ยนแปลงอย่างรวดเร็ว ระบบควบคุมต้องสามารถตอบสนองได้อย่างรวดเร็ว
หากกระบวนการมีการเปลี่ยนแปลงช้า ความต้องการความเร็วในการทำงานของระบบควบคุมจะไม่เข้มงวดนัก มีการบันทึกมากเกี่ยวกับพฤติกรรมคงตัวและพลวัตของตัวควบคุมและระบบควบคุม - ความอ่อนไหว เวลาตอบสนอง เป็นต้น ปัจจัยที่สำคัญที่สุดอาจเป็นความล่าช้าเวลาของลูปควบคุมทั้งหมด พลศาสตร์ของกระบวนการต้องได้รับการพิจารณาเพื่อเลือกประเภทตัวควบคุม เซ็นเซอร์ และแอคทูเอเตอร์ที่ถูกต้อง
ปฏิกิริยาของกระบวนการ
ปฏิกิริยาของกระบวนการ
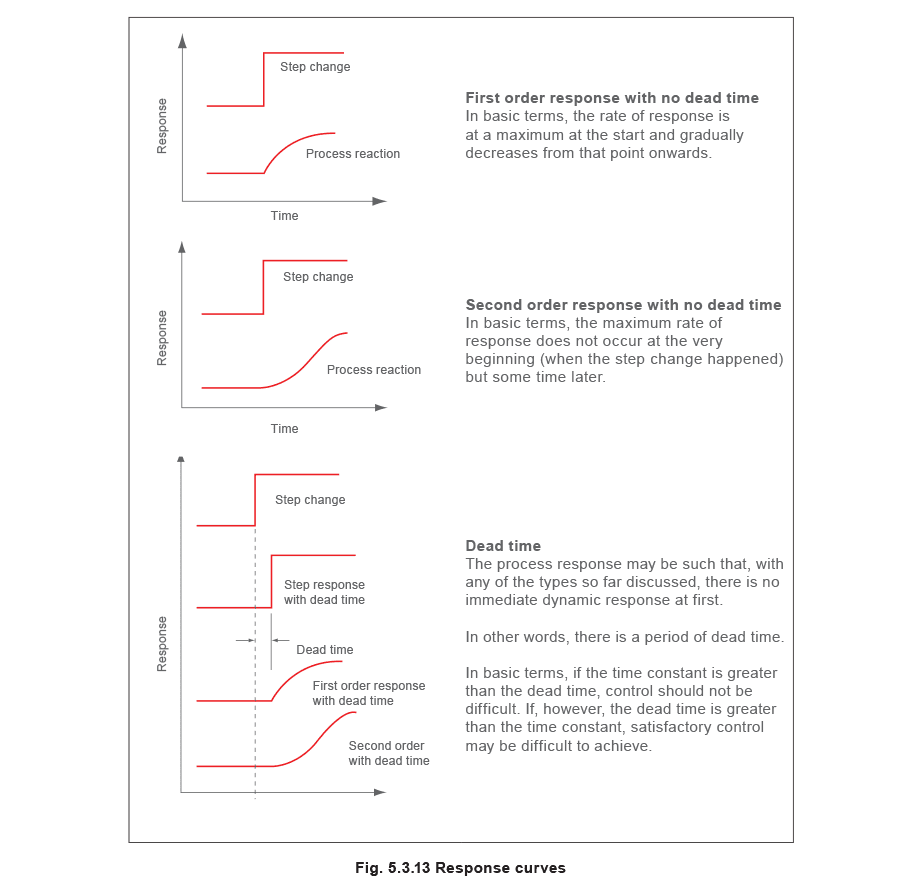
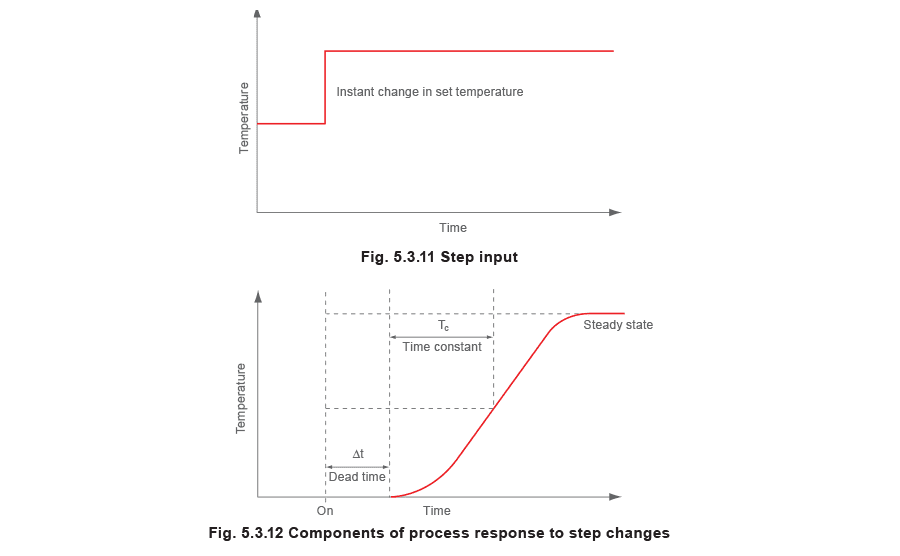
ลักษณะเฉพาะพลวัตเหล่านี้ถูกกำหนดโดยปฏิกิริยาของกระบวนการต่อการเปลี่ยนแปลงอย่างกะทันหันในการตั้งค่าการควบคุม เรียกว่าอินพุตขั้นตอน อาจรวมถึงการเปลี่ยนแปลงอุณหภูมิที่ตั้งทันที ดังที่แสดงในรูปที่ 5.3.11 การตอบสนองของระบบแสดงในรูปที่ 5.3.12 ซึ่งแสดง dead time บางส่วนก่อนที่อุณหภูมิกระบวนการจะเริ่มเพิ่มขึ้น Dead time นี้เกิดจากความล่าช้าในการควบคุมที่เกิดจากสิ่งต่างๆ เช่น แอคทูเอเตอร์ไฟฟ้าที่เคลื่อนไปยังตำแหน่งใหม่ ค่าคงที่เวลาจะแตกต่างกันตามการตอบสนองพลวัตของระบบ ได้รับผลกระทบจากสิ่งต่างๆ เช่น ไม่ว่าเซ็นเซอร์จะอยู่ในซองหรือไม่
การตอบสนองของกระบวนการสองกระบวนการใดๆ สามารถมีลักษณะเฉพาะที่แตกต่างกันเนื่องจากระบบ
ผลกระทบของ dead time และค่าคงที่เวลาต่อการตอบสนองของระบบต่อการเปลี่ยนแปลงอินพุตอย่างกะทันหันแสดงเป็นกราฟในรูปที่ 5.3.12 ระบบที่มีอัตราการตอบสนองเริ่มต้นเร็วต่อการเปลี่ยนแปลงอินพุตมักเรียกว่ามีการตอบสนองลำดับแรก ระบบที่มีอัตราการตอบสนองเริ่มต้นช้าต่อการเปลี่ยนแปลงอินพุตมักเรียกว่ามีการตอบสนองลำดับสอง ภาพรวมของประเภทพื้นฐานของการตอบสนองของกระบวนการ (ผลกระทบของ dead time การตอบสนองลำดับแรก และการตอบสนองลำดับสอง) แสดงในรูปที่ 5.3.13