คอมพิวเตอร์ในการควบคุม
ดูการพัฒนาล่าสุดในการควบคุมที่เกี่ยวข้องกับการใช้เทคโนโลยีสารสนเทศ
อาจเหมาะสมที่จะจบบล็อก 5 ด้วยการดูอย่างกว้างๆ เกี่ยวกับการมีส่วนร่วมของคอมพิวเตอร์ในระบบควบคุม
คำจำกัดความจากพจนานุกรมของคำว่า ‘คอมพิวเตอร์’ คือ ‘อุปกรณ์อิเล็กทรอนิกส์ที่โปรแกรมได้ซึ่งสามารถจัดเก็บ เรียกค้น และประมวลผลข้อมูล’ คำจำกัดความนี้รวมถึงตัวควบคุมลูปเดี่ยวและหลายลูปพื้นฐานที่พบทั่วไปในอุตสาหกรรมกระบวนการ ที่ which condition is read by a sensor, เปรียบเทียบกับจุดตั้งในตัวควบคุมผ่านรูทีนทางคณิตศาสตร์บางอย่างที่ดำเนินการเพื่อกำหนดการกระทำแก้ไขที่ต้องการ ตามด้วยสัญญาณเอาท์พุตที่เหมาะสม อัตราการพัฒนาของชิปคอมพิวเตอร์และผลกระทบต่อทุกด้านของชีวิตเป็นที่รู้จักกันดี อัตราความก้าวหน้าในเทคโนโลยีควบคุมแน่นอนหมายความว่าความเห็นบางส่วนด้านล่างจะล้าสมัยเมื่ออ่าน ประวัติ ตัวควบคุมลูปเดี่ยวแบบ stand-alone มีต้นกำเนิดมาจากตัวควบคุมนิวเมติก ซึ่งผ่านการใช้flaps and nozzles อย่างชาญฉลาด สามารถ approximate ฟังก์ชัน PID พื้นฐาน ตัวควบคุมที่ซับซ้อนและแพงเหล่านี้มักพบในโรงงานปิโตรเคมีขนาดใหญ่ที่การควบคุมกระบวนการที่แม่นยำ รวมถึงความปลอดภัยโดยธรรมชาติ (การไม่มีประกายไฟที่อาจเริ่มต้นไฟไหม้) เป็นสิ่งจำเป็น
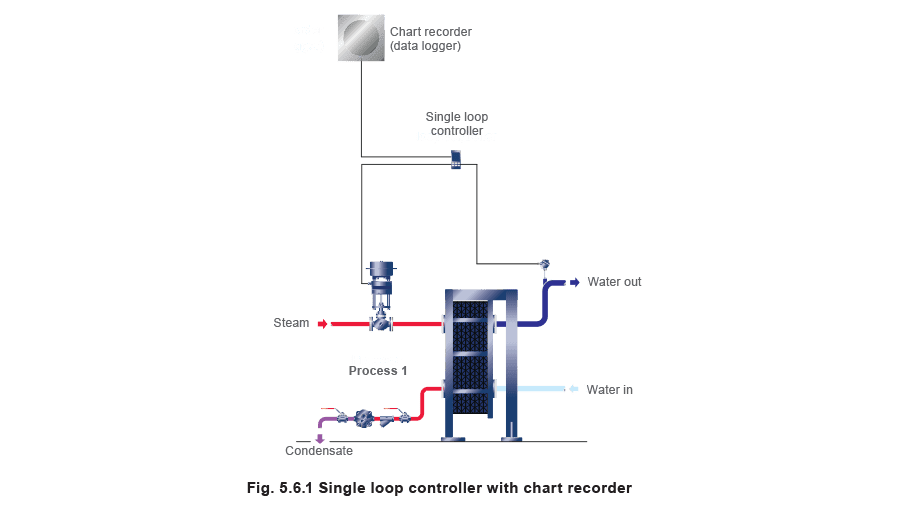
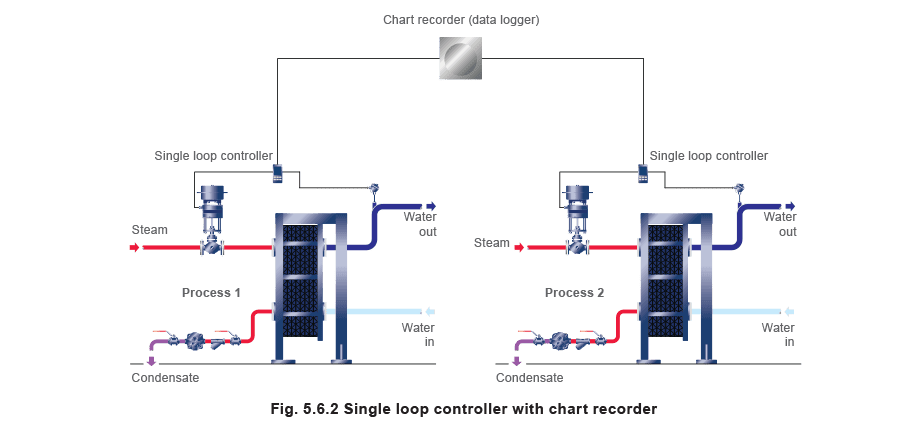
หลายครั้ง กระบวนการเหล่านี้ถูกเชื่อมต่อแยกกับเครื่องบันทึกแผนภูมิวงกลมท้องถิ่น (รูปที่ 5.6.1); หรืออีกทางหนึ่ง กระบวนการหลายตัวถูกเชื่อมต่อกับเครื่องบันทึกหลายปากกาในห้องควบคุม (รูปที่ 5.6.2) ในขณะที่เครื่องบันทึกหลายปากกาทำให้สามารถตรวจสอบพารามิเตอร์หลายตัวพร้อมกันได้ กลไกในเครื่องมือและจำนวนเส้นบนแผนภูมิเดียว effectively จำกัดการใช้งานประมาณสิบสองอินพุต
คอมพิวเตอร์เครื่องแรกที่ใช้ในระบบควบคุมแทนที่เครื่องบันทึกแผนภูมิหลักในห้องควบคุม พวกเขาเก็บข้อมูล (หรือ data) จากจุดจำนวนมากขึ้นรอบโรงงาน โดยทั่วไปเรียกว่า ‘data loggers’ (รูปที่ 5.6.3) และไม่มี input ต่อการทำงานของโรงงาน
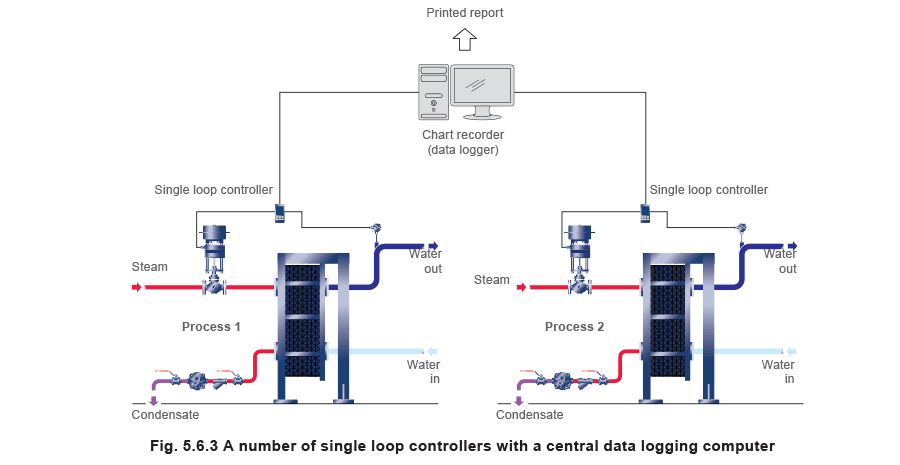
คอมพิวเตอร์ยุคแรกเหล่านี้มักถูกโปรแกรมให้พิมพ์รายงานในช่วงเวลาเฉพาะบนกระดาษพิมพ์ต่อเนื่อง โดยการสกัดข้อมูลจากเอกสารพิมพ์ของคอมพิวเตอร์ด้วยมือ ผู้จัดการโรงงานสามารถตรวจสอบการทำงานของโรงงานโดยรวม เปรียบเทียบผลการดำเนินงานของส่วนต่างๆ ของโรงงาน ค้นหาความเสื่อมถอยในผลการดำเนินงาน ซึ่งจะบ่งบอกถึงความจำเป็นในการหยุดทำงาน ฯลฯ
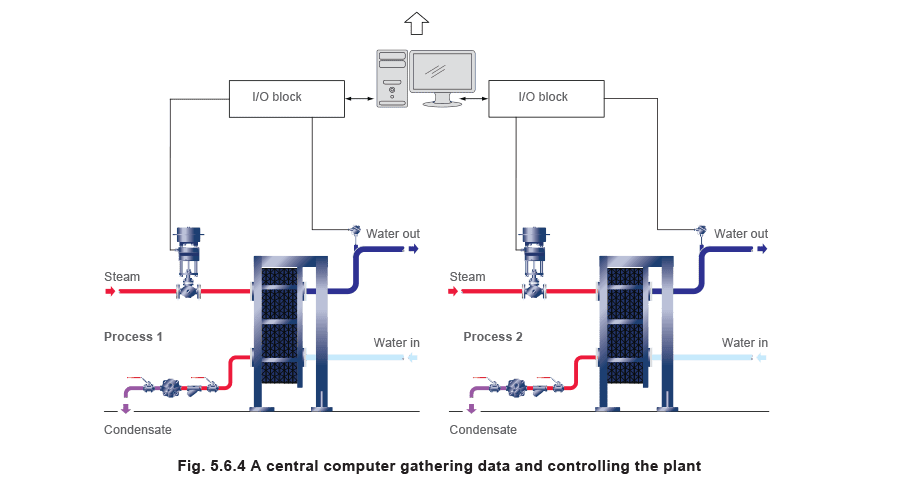
ในช่วงกลางทศวรรษ 1970 บริษัทเครื่องมือที่มีชื่อเสียงหลายแห่งเริ่มทำการตลาดระบบควบคุมดิจิทัล ระบบเหล่านี้ใช้หน่วยคอมพิวเตอร์กลาง ซึ่งรับสัญญาณจากเซ็นเซอร์ ดำเนินการรูทีนทางคณิตศาสตร์ และให้สัญญาณเอาท์พุตไปยังอุปกรณ์ควบคุมที่เกี่ยวข้องต่างๆ พวกเขายังรักษาบันทึกเหตุการณ์ไว้เพื่อตรวจสอบ (ดูรูปที่ 5.6.4)
หมายเหตุสำคัญ:
- คอมพิวเตอร์ส่วนบุคคล (PC) ไม่สามารถรับสัญญาณดิบจากเครื่องมือ (4 - 20 mA, 0 - 10 V) จากอุปกรณ์ควบคุมได้ อุปกรณ์ Input / Output (I / O) จำเป็นต้อง ‘แปล’ ระหว่างทั้งสอง ผู้ผลิต I / O แต่ละรายมีวิธีเฉพาะในการบรรลุสิ่งนี้ ซึ่งหมายความว่าระบบไม่ quite compatible ตามที่ตั้งใจไว้
- ในตอนแรก อุปกรณ์ I / O อยู่ในห้องควบคุมหลักของโรงงาน และแต่ละชิ้นส่วนของอุปกรณ์ถูกเชื่อมต่อกับห้องควบคุมหลักด้วยสายสัญญาณเฉพาะ นี่หมายความว่าในโรงงานขนาดใหญ่ การติดตั้งและการจัดการสายเคเบิลเป็นประเด็นสำคัญ ในแง่ของปริมาณทางกายภาพและค่าใช้จ่ายที่สอดคล้อง
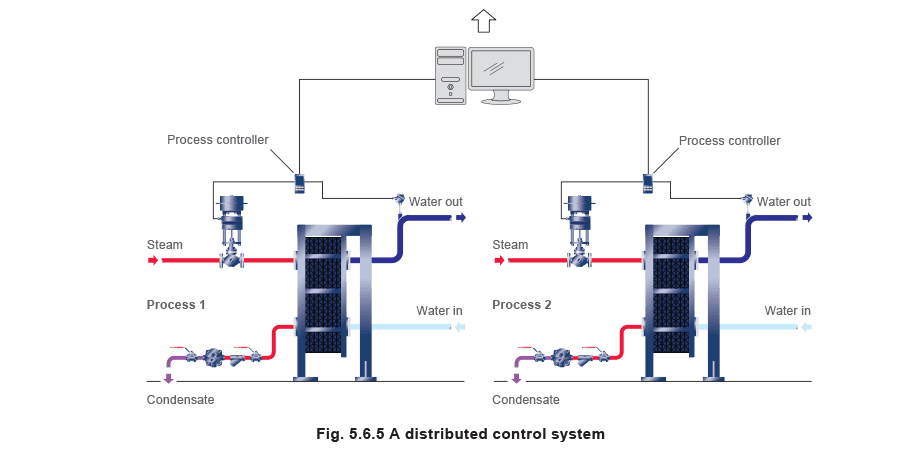
- เมื่อเทคโนโลยีก้าวหน้า อุปกรณ์ I / O ย้ายออกไปที่โรงงาน และปริมาณสายเคเบิลไปยังห้องควบคุมลดลง แต่ยังคงมีนัยสำคัญ ระบบควบคุมดิจิทัลเหล่านี้นำไปสู่การพัฒนาของ:
- ระบบควบคุมแบบกระจาย (DCS)
- ระบบควบคุมและเก็บข้อมูล (SCADA) และ
- ระบบจัดการอาคาร (BMS) … ทั้งหมดนี้ใช้กันอย่างแพร่หลายในปัจจุบัน (ดูรูปที่ 5.6.5)
ก้าวกระโดดยักษ์เกิดขึ้นในปลายทศวรรษ 1980 ด้วยการมาของ PC และสภาพแวดล้อมหน้าจอ Windows และระบบปฏิบัติการคอมพิวเตอร์ ให้มาตรฐาน platform สำหรับระบบควบคุมดิจิทัลยุคก่อนหน้า เนื่องจากบริษัทเครื่องมือทั้งหมดต้องทำงานในรูปแบบทั่วไป ข้อดีของระบบ Windows-based คือข้อมูลสามารถแลกเปลี่ยนได้ในลักษณะเดียวกับที่ผู้ใช้คอมพิวเตอร์ส่วนบุคคลในปัจจุบันสามารถแลกเปลี่ยนข้อมูลระหว่าง Word, ‘Excel’ และ ‘PowerPoint’ ได้อย่างอิสระ ภาษานี้เรียกว่า Dynamic Data Exchange (DDE) และต่อมาพัฒนาเป็น Object Linking and Embedding (OLE) ถูกดัดแปลงเพิ่มเติมสำหรับการควบคุมกระบวนการเพื่อเป็น OLE for Process Control (OPC) ซึ่งยังคงใช้ในขณะที่เขียน
การใช้ PC ยังหมายความว่าทางเลือกในการดูประวัติค่อนข้างง่ายขึ้น แทนที่จะจำกัดอยู่ที่เอกสารพิมพ์และการถ่ายโอนข้อมูลด้วยมือ ผู้จัดการโรงงานสามารถใช้โปรแกรมกราฟที่ทรงพลัง วิเคราะห์แนวโน้ม เพิ่มสี ปรับมาตราส่วน และใช้สัญลักษณ์; ตัวแปรที่แตกต่างกันสามารถพล็อตเทียบกัน และผลการดำเนินงานของโรงงานต่างๆ สามารถเปรียบเทียบได้
ระบบอัตโนมัติสมัยใหม่ใช้คอมพิวเตอร์เป็น ‘หน้าต่าง’ สำหรับกระบวนการ ผู้ปฏิบัติงานใช้คอมพิวเตอร์เพื่อตรวจสอบสิ่งที่เกิดขึ้นในโรงงานโดยรวม และแก้ไขจุดตั้งและพารามิเตอร์ควบคุม เช่น PID ของตัวควบคุมโรงงานแต่ละตัว ดังนั้นจึงปล่อยให้ตัวควบคุมแต่ละตัวทำงานอัลกอริทึม PID และตรรกะควบคุม
ด้วยเหตุนี้ ตัวควบคุม stand-alone ยังคงมีตำแหน่งในระบบอัตโนมัติสมัยใหม่เนื่องจากอยู่ในการควบคุมขั้นสุดท้าย แต่ตัวควบคุมมักอยู่ในรูปแบบของ PLC (Programmable Logic Controller) หรืออุปกรณ์หลายลูปแบบ rack mounted แตกต่างอย่างสิ้นเชิงในรูปลักษณ์จากตัวควบคุม PID ลูปเดี่ยว แทนที่ผู้ปฏิบัติงานจะใช้แป้นพิมพ์เพื่อเปลี่ยนจุดตั้งและพารามิเตอร์ควบคุมอื่นๆ ที่ตัวควบคุม พวกเขาถูกเปลี่ยนโดยผู้ปฏิบัติงานที่คอมพิวเตอร์ ซึ่งดาวน์โหลดพารามิเตอร์ที่ต้องการไปยังตัวควบคุมทางอิเล็กทรอนิกส์ ในกรณีที่คอมพิวเตอร์กลางล้มเหลว ตัวควบคุม stand-alone จะทำงานต่อด้วยพารามิเตอร์ปัจจุบันหรือเข้าสู่สภาวะปลอดภัย ดังนั้นจึงทำให้มั่นใจว่าโรงงานยังคงทำงานอย่างปลอดภัย
ขั้นตอนสำคัญถัดไปคือระบบที่เรียกว่า ‘Fieldbus’
Fieldbus ใช้ระบบสายเคเบิลดิจิทัลเดี่ยว ซึ่งเชื่อมต่อทุกรายการ (ดูรูปที่ 5.6.6)
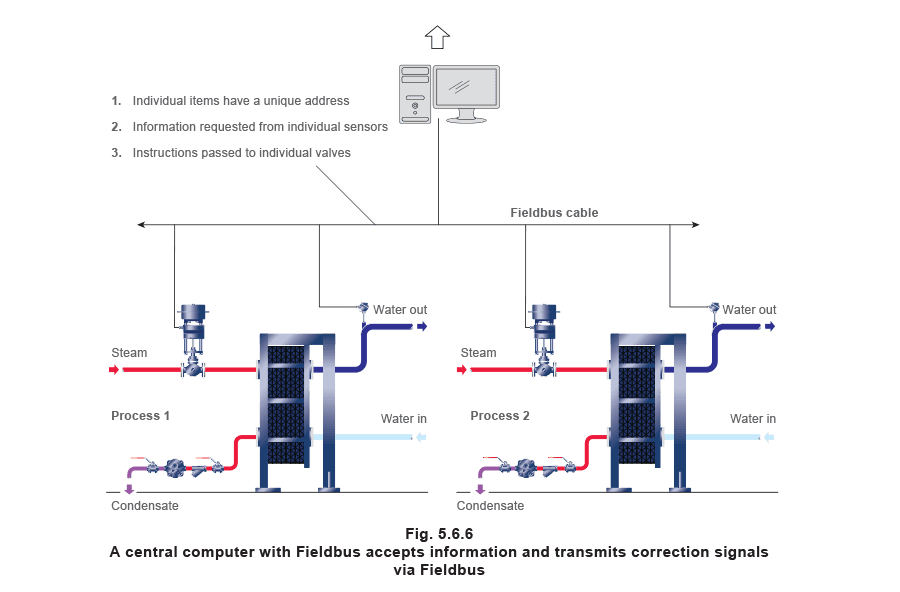
แต่ละรายการ (เซ็นเซอร์ ตัวควบคุม และอุปกรณ์ที่ควบคุม) ได้รับ address เฉพาะ ซึ่งใช้เพื่อขอข้อมูล (อาจจากเซ็นเซอร์) หรือเพื่อดำเนินการบางอย่าง (อาจปิดวาล์วควบคุม)
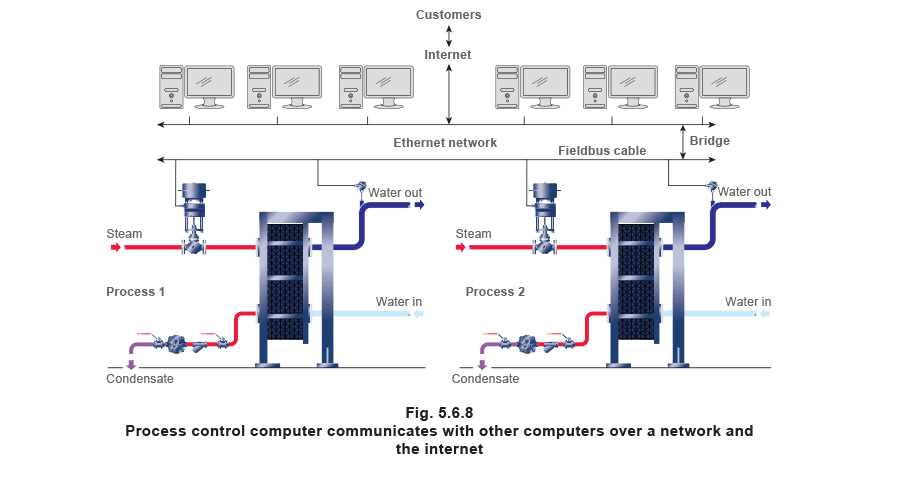
อย่างไรก็ตาม ระบบเหล่านี้ซับซ้อนและอาจมีราคาแพง เครือข่าย Fieldbus ต้องการตัวควบคุมหลักเพื่อจัดการการสื่อสารและตรรกะควบคุมบน Fieldbus ยังต้องการวิธีในการเชื่อมต่อ Fieldbus กับเครือข่ายคอมพิวเตอร์เพื่อให้ข้อมูลสามารถแบ่งปันได้ (ดูรูปที่ 5.6.8) อุปกรณ์ที่รวมบทบาทของตัวควบคุม Fieldbus และให้สะพานไปยังเครือข่าย PC เรียกว่า ‘bridge’ หรือ ‘ตัวควบคุมหลัก’ (ดูรูปที่ 5.6.7)

ด้านกระบวนการ bridge สามารถ:
- ขอและรับข้อมูลจากเซ็นเซอร์หลายตัว
- ใช้ข้อมูลนี้ในรูทีนทางคณิตศาสตร์ที่ซับซ้อนเพื่อกำหนดและส่งการกระทำแก้ไขที่ต้องการไปยังอุปกรณ์ควบคุม เช่น วาล์ว
- สามารถขอให้อุปกรณ์เริ่มต้นรูทีนการวินิจฉัยและรายงาน ด้านเครือข่ายคอมพิวเตอร์ สามารถให้:
- ข้อมูลประวัติของอุปกรณ์ เช่น วันที่และผลลัพธ์ของรูทีนการวินิจฉัยล่าสุด
- สัญญาณเตือนเมื่อกระบวนการหรืออุปกรณ์เกินพารามิเตอร์ที่ตั้งไว้
- ข้อมูลประวัติและปัจจุบันโดยละเอียดเกี่ยวกับผลการดำเนินงานของโรงงาน
หมายเหตุสำคัญ:
- Bridge มีความซับซ้อนแตกต่างกัน แต่อาจควบคุม 50+ กระบวนการ; เทียบเท่ากับตัวควบคุม PID ลูปเดี่ยว 50 ตัว
- หากต้องควบคุมกระบวนการมากขึ้น อาจใช้ bridge มากกว่าหนึ่งตัว
- Bridge อาจ located ที่จุดสะดวก around โรงงาน
- Bridge โดยปกติไม่แสดงข้อมูล ไม่มีปุ่มให้กด เป็นเพียง gateway อิเล็กทรอนิกส์; การโต้ตอบทั้งหมดทำผ่าน PC แม้ว่า Fieldbus จะเป็นเทคโนโลยีทั่วไปในทางทฤษฎี แต่มีความแตกต่างระหว่างผลิตภัณฑ์และโปรโตคอลที่ผู้ผลิตรายต่างๆ ใช้ ชื่อที่พบทั่วไปใน Fieldbus ได้แก่:
![]()
หมายเหตุสำคัญ: โปรโตคอลและผลิตภัณฑ์ Fieldbus ไม่สามารถใช้ร่วมกันได้โดยตรง มีวิธีรวม Fieldbus ที่แตกต่างกัน แต่อาจมีราคาแพง หมายความว่าผู้ใช้จะ adopted ระบบเดียวโดย exclusive
- ระบบ Fieldbus สามารถรวมเครื่องมือสัญญาณเก่า (4 - 20 mA, 0 - 10 V ฯลฯ) อย่างไรก็ตาม สัญญาณต้องเชื่อมต่อกับ Fieldbus ผ่านหน่วย I / O และในการทำเช่นนั้น ประโยชน์ของ Fieldbus จำนวนมาก (แต่ไม่ทั้งหมด) จะสูญหาย
- หมายความว่าเมื่อระบบ Fieldbus เฉพาะถูก adopted ในโรงงาน เป็นเรื่องผิดปกติที่ผู้ใช้จะ consider โปรโตคอลทางเลือก เมื่อเทคโนโลยีควบคุมก้าวหน้า PC ก็ก้าวหน้าด้วย คอมพิวเตอร์สามารถสื่อสารกันผ่านเครือข่าย (LAN – Local Area Network): ฝ่ายการเงิน การผลิต การตลาด และการขายภายในองค์กรสามารถแบ่งปันข้อมูลได้อย่างง่ายดาย และมีระดับอำนาจที่แตกต่างกันในการดำเนินงานต่างๆ อย่างหลีกเลี่ยงไม่ได้ คอมพิวเตอร์ควบคุมกระบวนการถูกเชื่อมต่อกับเครือข่าย อนุญาตให้บุคลากรที่ได้รับอนุญาตดูและแก้ไขการทำงานของโรงงานจาก PC ในสำนักงาน
เมื่อการผลิตกลายเป็น global Wide Area Networks (WAN) ได้พัฒนาขึ้น ด้วยเหตุนี้ วิศวกรที่ located ในลอนดอนสามารถ เช่น สอบถามคอมพิวเตอร์โรงงานที่บริษัทของเขาในนิวยอร์ก
ผลกระทบของเทคโนโลยีการควบคุมและการสื่อสารนี้มีมหาศาล ความรู้ ความเชี่ยวชาญ และอุปกรณ์มีอยู่แล้วที่:
คอมพิวเตอร์คลังสินค้าของลูกค้า ตอบสนองต่อคำสั่ง ‘สต็อกขั้นต่ำ’ หรือแผนการผลิต สามารถสั่งซื้อผ่านอินเทอร์เน็ต
คำสั่งซื้อถูกคอมพิวเตอร์ของผู้จัดส่งรับ ซึ่ง:
สอบถามคลังสินค้าสำหรับผลิตภัณฑ์และจัดส่ง หรือ
แก้ไขกำหนดการผลิตเพื่อรวมคำสั่งซื้อ อาจแก้ไขคำแนะนำกระบวนการเพื่อผลิตผลิตภัณฑ์เฉพาะ
• คอมพิวเตอร์จัดการจัดส่งผลิตภัณฑ์และออกใบแจ้งหนี้ให้ลูกค้า
• ไม่ต้องมีการแทรกแซงของมนุษย์ ประโยชน์ของเทคโนโลยี Fieldbus การติดตั้ง:
- ลดฮาร์ดแวร์ระบบ - ต้องการตัวควบคุมน้อยลงและสายไฟน้อยลงเพื่อควบคุมกระบวนการ
- ลดค่าใช้จ่ายในการติดตั้ง - ไม่เพียงแต่มีอุปกรณ์น้อยลงที่ต้องติดตั้ง การติดตั้งง่ายขึ้นและเร็วขึ้น ดังนั้นจึงลดต้นทุนวัสดุและแรงงานอย่างมีนัยสำคัญสำหรับการติดตั้งสายไฟ ถาดสายเคเบิล ท่อ ตู้ marshalling กล่อง junction และ terminal blocks
- ต้องการพื้นที่น้อยลง - เนื่องจากมีอุปกรณ์น้อยลงและสายไฟน้อยลงในห้องควบคุม มีพื้นที่มากขึ้นสำหรับการใช้งานอื่นๆ เช่นเดียวกัน จะมีพื้นที่มากขึ้นสำหรับอุปกรณ์ผลิตในโรงงาน
- แบบวิศวกรรม - คอมพิวเตอร์สร้างแบบวาดตรรกะกระบวนการโดยอัตโนมัติ ดังนั้นจึงถูกต้องและทันสมัยเสมอ การดำเนินงาน:
- ความปลอดภัย - การกระทำของสถานะข้อผิดพลาดถูกฝังในซอฟต์แวร์พร้อมการกระทำเฉพาะที่กำหนดไว้ ในกรณีที่คอมพิวเตอร์หลักล้มเหลว การควบคุมจะกลับไปยัง bridge ‘ท้องถิ่น’ ที่มีแหล่งจ่ายไฟอิสระและถูกโปรแกรมให้ default ไปยัง ‘โหมดปลอดภัย’ ที่เกี่ยวข้องกับกระบวนการ
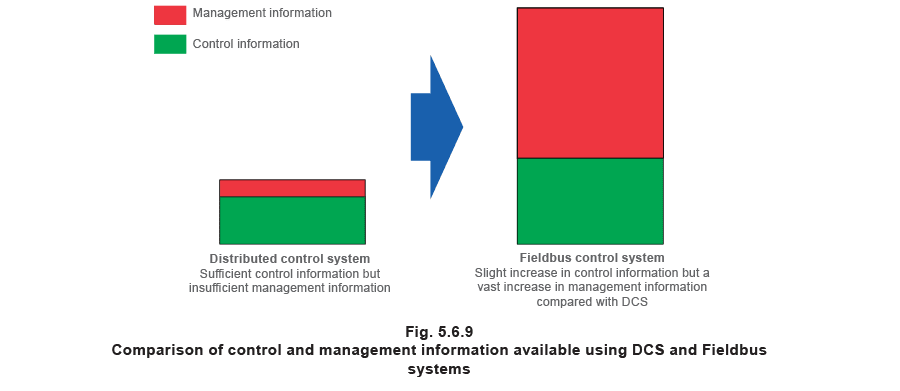
- ข้อมูลกระบวนการเพิ่มขึ้น - ปริมาณข้อมูลที่มีให้ผู้ปฏิบัติงานและฝ่ายจัดการเพิ่มขึ้นหลายเท่าเมื่อเทียบกับระบบควบคุมแบบกระจาย (DCS) ดูรูปที่ 5.6.9 อุปกรณ์แต่ละตัว (เช่น เซ็นเซอร์และวาล์ว) สามารถสอบถาม ดู และวิเคราะห์ได้อย่างง่ายดาย กระบวนการทั้งหมด หรือส่วนต่างๆ ของกระบวนการ อาจดูและวิเคราะห์เพื่อระบุข้อจำกัด ความสามารถในการปรับปรุง เป็นต้น
- การบำรุงรักษาเชิงรุก - คอมพิวเตอร์หลักสามารถดำเนินการรูทีนการวินิจฉัยโดยละเอียด ทดสอบความล้มเหลวของเซ็นเซอร์ ความล้มเหลวของเอาท์พุต ความล้มเหลวของหน่วยความจำ ข้อผิดพลาดในการกำหนดค่า ข้อผิดพลาดในการสื่อสาร ตำแหน่งวาล์วและเวลาเดินทางของวาล์วที่ใช้ การกระทำ stick-slip เป็นต้น ดังนั้น การบำรุงรักษาและการสอบเทียบขึ้นอยู่กับสภาพจริงของอุปกรณ์แทนช่วงเวลา ดังนั้นการบำรุงรักษาจึงลดลงเหลือเฉพาะสิ่งที่จำเป็น อุปกรณ์หลายตัวสามารถดำเนินการรูทีนการบำรุงรักษาและการสอบเทียบพร้อมกันได้ หมายความว่ามีการหยุดทำงานน้อยลงหรือสั้นลง เพิ่มความพร้อมใช้งานของโรงงาน เวลา วัสดุ และแรงงานที่สูญเสียไปกับการบำรุงรักษาที่ไม่จำเป็นถูกหลีกเลี่ยง หมายความว่าต้นทุนการบำรุงรักษาถูก minimize
- ความน่าเชื่อถือของระบบ - การบำรุงรักษาเชิงรุกหมายความว่าอุปกรณ์ได้รับการดูแลอย่างดี
- การควบคุมคุณภาพ - การควบคุมแบบรวมศูนย์และความสามารถในการดูกระบวนการเป็นส่วนๆ หรือทั้งหมด ปรับปรุงการควบคุมคุณภาพ
- การถือครองสต็อก - การตอบสนองและความยืดหยุ่นที่ดีขึ้นจากโรงงานหมายความว่าสินค้าคงคลังผลิตภัณฑ์มักสามารถลดลงได้
- อะไหล่ - เนื่องจากความเข้ากันได้และความสามารถในการแลกเปลี่ยนของส่วนประกอบ ผู้ใช้ไม่ถูกผูกมัดกับผู้จัดส่งส่วนประกอบรายเดียว ดังนั้นราคาจึงมีการแข่งขัน ยังหมายความว่าสินค้าคงคลังอะไหล่สามารถ minimize ได้ ประหยัดต้นทุนอีกครั้ง
- การสื่อสาร - ระบบควบคุมหรือส่วนประกอบใดๆ สามารถเข้าถึงได้จากทุกที่ ไม่ว่าจะผ่านเครือข่ายคอมพิวเตอร์ หรืออินเทอร์เน็ต การพัฒนาระบบ Fieldbus ความยืดหยุ่น:
- ระบบสามารถอัปเดตได้อย่างง่ายดายเพื่อทำงานกับข้อกำหนดกระบวนการที่แก้ไข
- ระบบสามารถขยายได้อย่างง่ายดายเพื่อรับการขยายโรงงานหรือกระบวนการใหม่
- ความเข้ากันได้กับระบบอื่นหมายความว่าอุปกรณ์สามารถจัดหาในราคาที่มีการแข่งขัน