Controladores e Sensores
Controladores e sensores são partes importantes do sistema de controle; sem informações do sensor, o controlador não pode tomar uma decisão e instruir a válvula a se mover. Este tutorial discute brevemente os diferentes tipos de controladores e sensores disponíveis e como eles operam. Uma breve explicação dos sinais de controle digital e analógico também é fornecida.
Controladores É importante declarar desde o início que nem todas as aplicações de controle necessitam de um controlador sofisticado.
Uma válvula liga/desliga e atuador, por exemplo, podem ser operados diretamente por um termostato. Outro exemplo é a operação de controles de segurança de limite alto, que têm uma ação ‘instantânea’ para fechar válvulas ou desligar fornecimentos de combustível.
No entanto, quando os requisitos de controle se tornam mais sofisticados, um controlador é necessário para corresponder a esses requisitos.
O controlador recebe um sinal, decide qual ação é necessária e então envia um sinal ao atuador para fazê-lo se mover.
Na era do microchip, circuitos integrados e computadores, as funções desempenhadas pelo controlador podem ser muito complexas.
No entanto, já que uma analogia entre o cérebro humano e controladores/computadores foi feita em Módulos anteriores, o renomado lema da IBM pode ser parafraseado:
Computador - Rápido, preciso e estúpido
Ser humano - Lento, desleixado e brilhante
Resumindo, o controlador não resolverá todos os problemas. Deve ser adequadamente selecionado e comissionado, assuntos que serão tratados mais tarde.
Embora a maioria dos controladores seja agora baseada em digital/microprocessador eletrônico, uma gama de controladores pneumáticos está disponível comercialmente. Estes podem ser usados em áreas perigosas onde o risco de explosão impede o uso de eletrônica/eletrônicos. É possível tornar equipamentos elétricos ‘intrinsecamente seguros’ ou à prova de explosão ou à prova de chamas, no entanto, geralmente há um custo substancial envolvido.
Conforme mencionado anteriormente, as funções realizadas pelo controlador podem ser muito complexas e está fora do escopo desta publicação listá-las em detalhes ou explicar como operam.
As principais variações que requerem consideração são as seguintes:
Controlador de loop único
Opera uma válvula/atuador a partir de um único sensor.
Controlador de múltiplos loops
Pode operar mais de uma válvula/atuador a partir de mais de um sensor.
Entrada/saída única
Pode aceitar apenas um sinal do sensor e enviar apenas um ao atuador.
Multi-entrada/saída (multicanal)
Pode aceitar vários sinais e enviar vários sinais.
Tempo real
Pode incluir um relógio para comutar em tempos pré-determinados, pré-ajustados.
Tempo decorrido
Pode comutar em algum tempo pré-determinado, pré-ajustado antes ou depois de outros itens de equipamento terem sido ligados ou desligados.
Rampa e patamar
Usando temperatura como exemplo, a capacidade de elevar a temperatura de um meio controlado em um período de tempo especificado e depois mantê-la em um valor pré-ajustado. Tais controladores frequentemente incorporam uma série de rampas e patamares.
A Figura 6.7.1 mostra um controlador típico eletrônico de loop único. Este tem ação P + I + D (discutida nos Módulos 5.2 e 5.4), adequado para fornecimento de 110 ou 230 volts.
A Figura 6.7.2 mostra um controlador pneumático de loop único com ação P.
Diferentes modelos podem ser selecionados para controlar temperatura ou pressão.
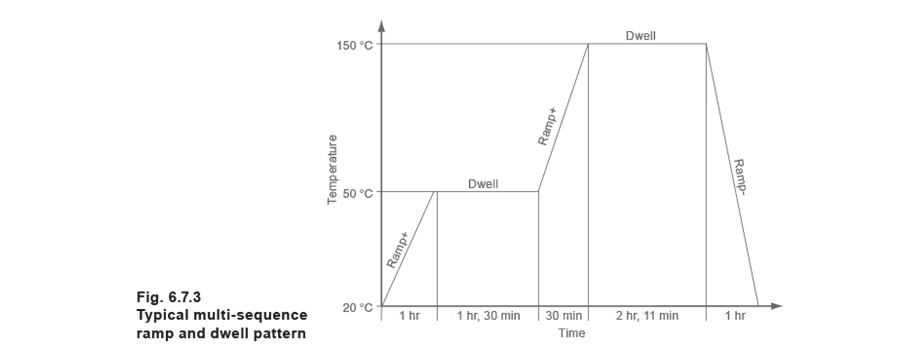
Um controlador de loop único, que tem a capacidade de realizar funções de rampa e patamar, pode ter um padrão de sequência típico como o mostrado na Figura 6.7.3. Isso mostra uma série de funções de rampas (mudança de temperatura) e patamar (manutenção de temperatura), realizadas ao longo de um período de tempo
Um termo frequentemente encontrado na literatura de controle é ‘Controlador Lógico Programável (PLC)’. Em um processo em lote, o controlador deve acionar uma sequência de ações, por exemplo, ligar ou desligar válvulas ou bombas. Em alguns casos toda a sequência é baseada em tempo, mas frequentemente os vários passos podem ser acionados por uma condição específica sendo alcançada e mantida por um certo período de tempo; por exemplo, uma certa temperatura sendo alcançada ou um vaso sendo preenchido. Essas sequências podem ser controladas por um PLC, um dispositivo baseado em microcomputador que utiliza interfaces padrão para sensores e atuadores para controlar o processo. Outro tipo de controlador complexo é o controlador de sala de máquinas, que pode ser usado para controlar a caldeira, bomba, válvula de controle de aquecimento, válvula de AQS, bem como fornecer uma série de outros recursos. Sensores Nesta Seção, o assunto de medição de temperatura será coberto de forma mais ampla. Há uma grande variedade de sensores e transdutores disponíveis para medir pressão, nível, umidade e outras propriedades físicas. O sensor é a parte do sistema de controle que experimenta a mudança na variável controlada. O sensor pode ser de um tipo onde uma mudança na temperatura resulta em uma mudança de tensão ou talvez uma mudança de resistência.
O sinal do sensor pode ser muito pequeno, criando a necessidade de condicionamento local de sinal e amplificação para lê-lo efetivamente. Uma pequena mudança na resistência sinalizada por um sensor em resposta a uma mudança de temperatura pode, por exemplo, ser convertida em uma tensão elétrica ou corrente para transmissão posterior ao controlador.
O sistema de transmissão em si é uma fonte potencial de erro.
A fiação incorre resistência elétrica (medida em ohms), além de estar sujeita a interferência elétrica (ruído). Em um sistema pneumático comparável, também pode haver pequenos vazamentos no sistema de tubulação.
O termo ‘termostato’ é geralmente usado para descrever um sensor de temperatura com comutação liga/desliga.
‘Transdutor’ é outro termo comum, e refere-se a um dispositivo que converte uma característica física em outra; por exemplo, temperatura em tensão (milivolts).
Um exemplo de transdutor é um dispositivo que converte uma mudança de temperatura em uma mudança de resistência elétrica.
Com dispositivos pneumáticos, a palavra ‘transmissor’ é frequentemente encontrada. É simplesmente outra descrição de transdutor ou sensor, mas geralmente com algum condicionamento de sinal adicional.
No entanto, o dispositivo de medição real é geralmente denominado como o sensor, e os tipos mais comuns serão descritos na Seção seguinte.
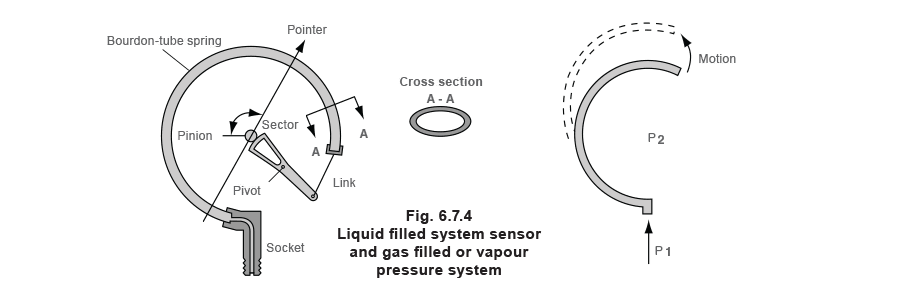
Sensores de sistema preenchido
Com controladores pneumáticos, sensores de sistema preenchido são empregados. A Figura 6.7.4 ilustra os princípios de tal sistema.
One term frequently found in control literature is ‘Programmable Logic Controller (PLC)’. In a batch process, the controller must trigger a sequence of actions, for example, turning valves or pumps on or off. In some cases the whole sequence is on a timed basis, but often the various steps may be triggered by a specific condition being reached and maintained for a certain time period; for example a certain temperature being reached or a vessel filled. These sequences can be controlled by a PLC, a microcomputer-based device that utilises standard interfaces for sensors and actuators to control the process.
Another type of complex controller is the plant room controller, which might be used to control the boiler, pump, heating control valve, HWS valve, as well as providing a number of other features.
Quando a temperatura muda, o fluido se expande ou contrai, fazendo com que o tubo Bourdon tenda a se endireitar. Às vezes um fole é usado em vez de um tubo Bourdon.
No passado, o preenchimento foi frequentemente mercúrio. Quando aquecido, ele se expande, fazendo com que o tubo Bourdon se desenrole; o resfriamento causa contração e força o tubo Bourdon a se enrolar mais firmemente. Esse movimento de enrolamento é usado para operar alavancas dentro do controlador pneumático permitindo que ele realize sua tarefa. Uma versão de sensor de pressão simplesmente utilizará um tubo de pressão conectado ao tubo Bourdon. Nota: por razões de saúde e segurança, o mercúrio agora é usado com menos frequência. Em vez disso, um gás inerte como nitrogênio é frequentemente empregado.
Detectores de temperatura por resistência (RTDs)
RTDs (Figura 6.7.5) empregam o fato de que a resistência elétrica de certos metais muda à medida que a temperatura se altera. Eles atuam como transdutores elétricos, convertendo mudanças de temperatura em mudanças de resistência elétrica. Platina, cobre e níquel são três metais que atendem aos requisitos de RTD e a Figura 6.7.6 mostra a relação entre resistência e temperatura.
Um detector de temperatura por resistência é especificado em termos de sua resistência a 0°C e a mudança de resistência de 0°C a 100°C. O RTD mais amplamente usado para as aplicações típicas cobertas nestes Módulos são RTDs de platina. Estes são construídos com uma resistência de 100 ohms a 0°C e são frequentemente referidos como sensores Pt100. Podem ser usados em uma faixa de temperatura de -200°C a +800°C com alta precisão (±0,5%) entre 0°C e 100°C.
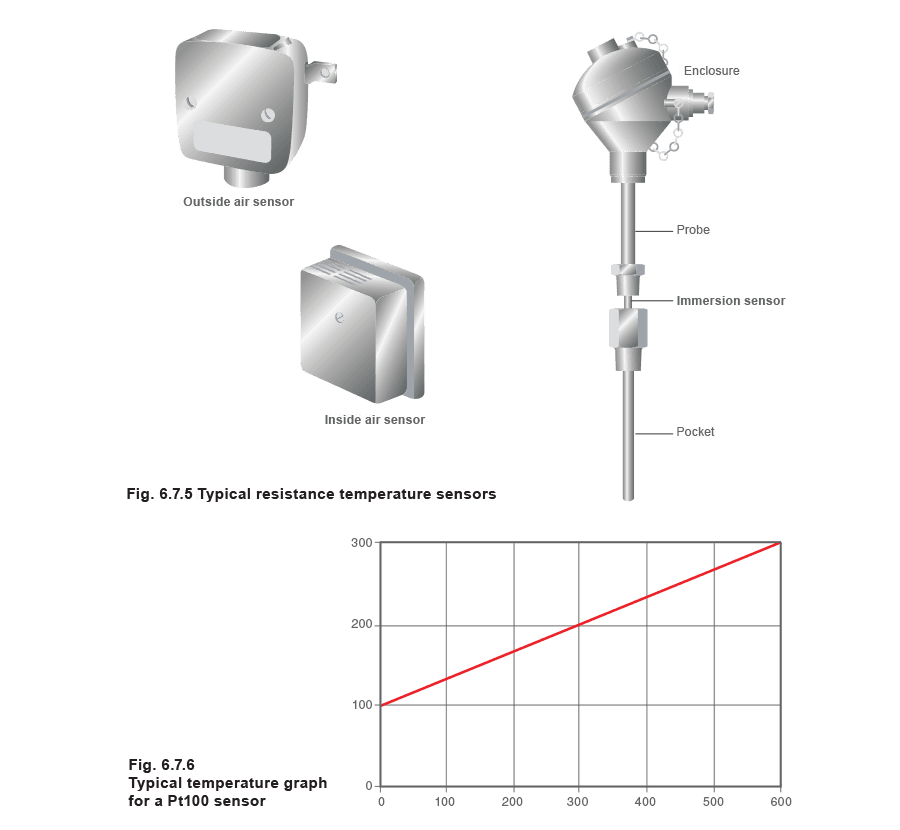 Como pode ser visto na Figura 6.7.6, o aumento da resistência com a temperatura é praticamente linear. Pt100s têm uma mudança relativamente pequena de resistência, o que requer medição cuidadosa. A resistência nos cabos de conexão precisa ser devidamente compensada.
Como pode ser visto na Figura 6.7.6, o aumento da resistência com a temperatura é praticamente linear. Pt100s têm uma mudança relativamente pequena de resistência, o que requer medição cuidadosa. A resistência nos cabos de conexão precisa ser devidamente compensada.
Termistores
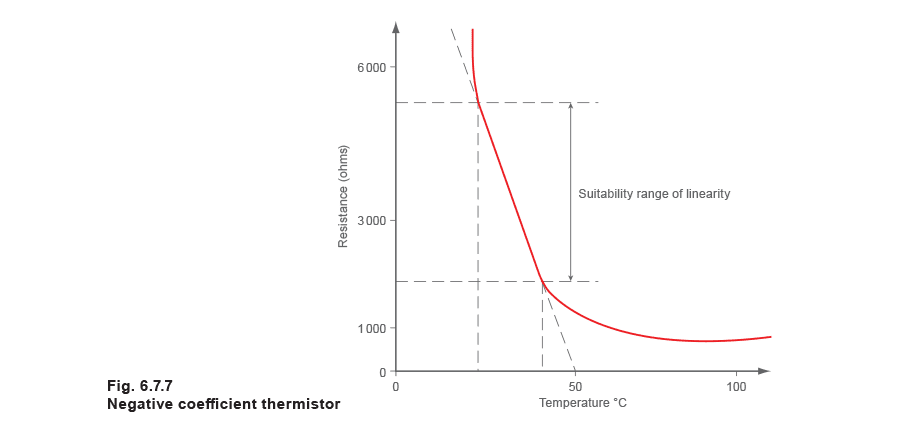
Termistores usam materiais semicondutores, que têm uma grande mudança na resistência com o aumento da temperatura, mas são não lineares. A resistência diminui em resposta ao aumento da temperatura (termistor de coeficiente negativo), conforme mostrado na Figura 6.7.7.
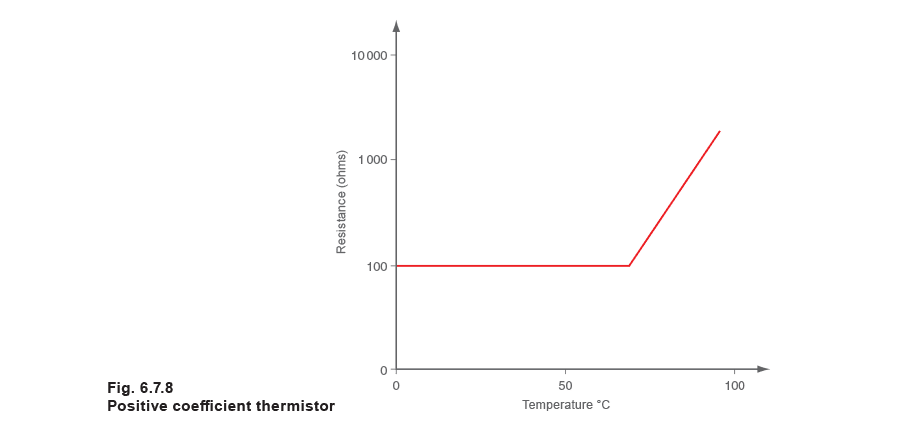
 Termistores de coeficiente positivo podem ser fabricados onde a resistência aumenta com o aumento da temperatura (Figura 6.7.8), mas sua curva de resposta os torna geralmente inadequados para sensoriamento de temperatura.
Os termistores são menos complexos e menos caros que os RTDs, mas não possuem a mesma alta precisão e repetibilidade. Sua alta resistência significa que a resistência do cabo de conexão é menos importante.
Termistores de coeficiente positivo podem ser fabricados onde a resistência aumenta com o aumento da temperatura (Figura 6.7.8), mas sua curva de resposta os torna geralmente inadequados para sensoriamento de temperatura.
Os termistores são menos complexos e menos caros que os RTDs, mas não possuem a mesma alta precisão e repetibilidade. Sua alta resistência significa que a resistência do cabo de conexão é menos importante.
 Termopares
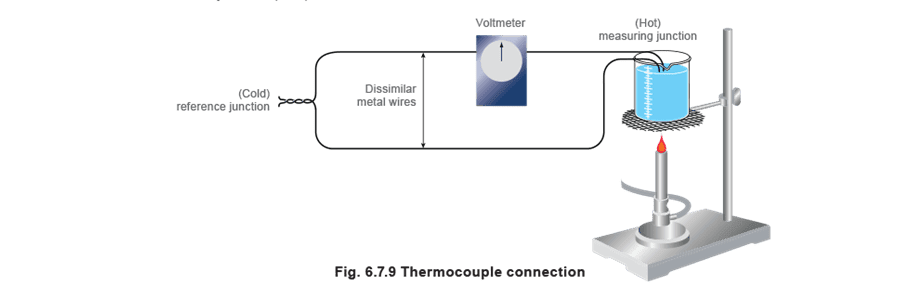
Se dois metais diferentes forem unidos em dois pontos e o calor for aplicado a uma junção (conforme mostrado na Figura 6.7.9), uma corrente elétrica fluirá ao redor do circuito. Termopares produzem uma tensão correspondente à diferença de temperatura entre a junção de medição (quente) e a junção de referência (fria).
Termopares
Se dois metais diferentes forem unidos em dois pontos e o calor for aplicado a uma junção (conforme mostrado na Figura 6.7.9), uma corrente elétrica fluirá ao redor do circuito. Termopares produzem uma tensão correspondente à diferença de temperatura entre a junção de medição (quente) e a junção de referência (fria).
 A temperatura da junção fria de referência deve ser conhecida com precisão se o próprio termopar deve fornecer sensoriamento preciso.
Tradicionalmente, a junção fria era imersa em gelo derretendo (0°C), mas a temperatura da junção fria agora é medida por um termistor ou RTD e, a partir disso, a temperatura indicada, geralmente na junção de medição, é corrigida. Isso é conhecido como compensação de junção fria.
A temperatura da junção fria de referência deve ser conhecida com precisão se o próprio termopar deve fornecer sensoriamento preciso.
Tradicionalmente, a junção fria era imersa em gelo derretendo (0°C), mas a temperatura da junção fria agora é medida por um termistor ou RTD e, a partir disso, a temperatura indicada, geralmente na junção de medição, é corrigida. Isso é conhecido como compensação de junção fria.
Qualquer par de metais diferentes pode ser usado para fazer um termopar. Mas ao longo dos anos, uma série de tipos padrão evoluiu que possuem uma relação documentada de tensão e temperatura. Os tipos padrão são referidos pelo uso de letras, ou seja, Tipo J, K, T e outros. O termopar de uso geral mais amplamente usado é o Tipo K.
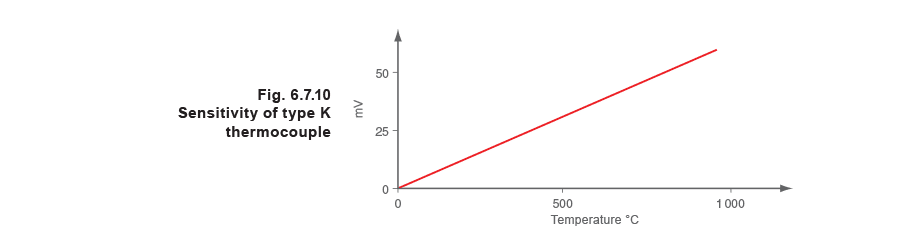
Os metais diferentes usados neste tipo são Cromo (90% níquel, 10% cromo) e Alumel (94% níquel, 3% manganês, 2% alumínio e 1% silício) e podem ser usados na faixa de 0°C a 1 260°C. A Figura 6.7.10 ilustra a sensibilidade dos termopares Tipo K, e pode-se ver que a tensão de saída é linear em toda a faixa.
O termopar de uso geral mais amplamente usado é o Tipo K.
Os metais diferentes usados neste tipo são Cromo (90% níquel, 10% cromo) e Alumel (94% níquel, 3% manganês, 2% alumínio e 1% silício) e podem ser usados na faixa de 0°C a 1 260°C. A Figura 6.7.10 ilustra a sensibilidade dos termopares Tipo K, e pode-se ver que a tensão de saída é linear em toda a faixa.
 Fios de extensão são usados para conectar a junção de medição à junção de referência no caso do instrumento. Esses fios de extensão podem ser do mesmo material dos fios do próprio termopar, ou podem ser um cabo de compensação feito de cobre e liga de cobre-níquel. Ambos os fios de extensão devem ser do mesmo material.
Os termopares estão disponíveis em uma grande variedade de tamanhos e formas. São baratos, robustos e razoavelmente precisos, com amplas faixas de temperatura. No entanto, a temperatura da junção de referência deve ser mantida em um valor constante, caso contrário as deviações devem ser compensadas. As baixas tensões de junção significam que cabo blindado especial e instalação cuidadosa devem ser usados para evitar interferência elétrica ou ‘ruído’ de distorcer os sinais.
Fios de extensão são usados para conectar a junção de medição à junção de referência no caso do instrumento. Esses fios de extensão podem ser do mesmo material dos fios do próprio termopar, ou podem ser um cabo de compensação feito de cobre e liga de cobre-níquel. Ambos os fios de extensão devem ser do mesmo material.
Os termopares estão disponíveis em uma grande variedade de tamanhos e formas. São baratos, robustos e razoavelmente precisos, com amplas faixas de temperatura. No entanto, a temperatura da junção de referência deve ser mantida em um valor constante, caso contrário as deviações devem ser compensadas. As baixas tensões de junção significam que cabo blindado especial e instalação cuidadosa devem ser usados para evitar interferência elétrica ou ‘ruído’ de distorcer os sinais.
Exemplo 6.7.1 Imagine duas pessoas, pessoa A e pessoa B, cada uma em colinas opostas e cada uma com uma bandeira e um mastro. O objetivo é que a pessoa A se comunique com a pessoa B elevando sua bandeira a uma certa altura. A pessoa A eleva sua bandeira até a metade do mastro. A pessoa B vê isso e também eleva sua bandeira até a metade. Conforme a pessoa A move sua bandeira para cima ou para baixo, a pessoa B faz o mesmo para corresponder. Isso seria semelhante a um sistema analógico.
Exemplo 6.7.2 Agora assuma que a pessoa A não tem um mastro, mas sim tem duas placas, uma com a figura ‘0’ e a outra com a figura ‘1’, e novamente quer que a pessoa B eleve sua bandeira até a metade, ou seja, a uma altura de 50% de seu mastro. O número binário para 50 é 110010, então ela exibe suas placas, duas de cada vez, na ordem correspondente. A pessoa B lê essas placas, traduz para significar 50 e eleva sua bandeira exatamente até a metade. Isso seria semelhante a um sistema digital.
Pode-se ver que o sistema digital é mais preciso, pois a informação é ou um ‘1’ ou um ‘0’ e a posição pode ser definida com precisão. O exemplo analógico não é tão preciso porque a pessoa B não pode determinar se a bandeira da pessoa A está exatamente a 50%. Pode estar a 49% ou 51%. É por essa razão, juntamente com a maior integração de circuitos de microprocessador, que os sinais digitais estão se tornando mais amplamente usados.
Endereçamento digital O endereçamento digital permite que um controlador envie informações através de um conjunto de fios nos quais vários receptores estão conectados e ainda ser capaz de se comunicar com apenas um desses receptores se necessário. Isso é feito alocando um endereço para cada receptor, que o controlador deve transmitir primeiro.
Para explicar isso, considere o exemplo digital acima, mas agora assuma que há outra pessoa, pessoa C em uma terceira colina. A pessoa B e a pessoa C podem ambas ver a pessoa A, então a pessoa A deve primeiro indicar para quem ela está se comunicando.
Isso é feito com a primeira placa. Se a primeira placa for um ‘0’, então todos os dados subsequentes são destinados à pessoa B que ajusta sua bandeira de acordo. Inversamente, se a primeira placa for um ‘1’, então todos os dados subsequentes são destinados à pessoa C. Portanto a pessoa B tem um endereço digital de ‘0’ e a pessoa C tem um endereço digital de ‘1’; cada pessoa sabe que o primeiro número a ser visto por elas se refere ao endereço, não à mensagem. HART®, PROFIBUS® e Foundation™ Fieldbus.
O que é PROFIBUS®? PROFIBUS® é um padrão de fieldbus aberto para uma ampla gama de aplicações em automação de fabricação e processo, independente de fabricantes. A independência de fabricantes e a transparência são garantidas pelos padrões internacionais EN 50170, EN 50254 e IEC 61158.
Permite comunicação entre dispositivos de diferentes fabricantes sem qualquer ajuste especial de interface. PROFIBUS® pode ser usado tanto para aplicações de alta velocidade e tempo crítico quanto para tarefas de comunicação complexas. PROFIBUS® oferece protocolos de comunicação funcionalmente graduados DP e FMS. Dependendo da aplicação, as tecnologias de transmissão RS-485, IEC 1158-2 ou fibras ópticas podem ser usadas.
Ele define as características técnicas de um sistema serial Fieldbus® com o qual controladores digitais programáveis distribuídos podem ser conectados em rede, do nível de campo ao nível de célula. PROFIBUS® é um sistema multi-mestre e, portanto, permite a operação conjunta de vários sistemas de automação, engenharia ou visualização com seus periféricos distribuídos em um único barramento.
No nível de sensor/atuador, sinais dos sensores e atuadores binários são transmitidos via um barramento de sensor/atuador. Os dados são transmitidos puramente de forma cíclica.
No nível de campo, os periféricos distribuídos, como módulos I/O, transdutores de medição, unidades de acionamento, válvulas e terminais de operador comunicam com os sistemas de automação através de um sistema de comunicação eficiente e em tempo real. Assim como dados, alarmes, parâmetros e dados de diagnóstico também podem ser transmitidos ciclicamente se necessário.
No nível de célula, controladores programáveis como PLC e IPC podem se comunicar entre si. O fluxo de informação requer grandes pacotes de dados e um grande número de funções de comunicação poderosas, como integração suave em sistemas de comunicação abrangentes da empresa, como Intranet e Internet via TCP/IP e Ethernet.
O que é Foundation™ Fieldbus? Foundation™ Fieldbus é um sistema de comunicação serial, digital e bidirecional que serve como uma Rede de Área Local (LAN) para instrumentação e dispositivos de controle de fábrica/planta. O ambiente Fieldbus® é o grupo de nível base das redes digitais na hierarquia das redes da planta. Foundation™ Fieldbus é usado tanto em aplicações de automação de processo quanto de fabricação e possui uma capacidade incorporada para distribuir a aplicação de controle através da rede.
Ao contrário de protocolos de rede proprietários, Foundation™ Fieldbus não é propriedade de nenhuma empresa individual, nem regulado por uma única nação ou órgão de padrões. A Foundation™ Fieldbus, uma organização sem fins lucrativos consistindo de mais de 100 dos principais fornecedores e usuários finais de controles e instrumentação do mundo, controla a tecnologia.
Enquanto Foundation™ Fieldbus retém muitas das características desejáveis do sistema analógico 4-20 mA, como uma interface física padronizada para o fio, dispositivos alimentados pelo barramento em um único fio, e opções de segurança intrínseca, ela também oferece muitos outros benefícios.
Interoperabilidade de dispositivos Foundation™ Fieldbus oferece interoperabilidade; um dispositivo Fieldbus® pode ser substituído por um dispositivo semelhante com funcionalidade adicional de um fornecedor diferente na mesma rede Fieldbus®, mantendo as operações especificadas. Isso permite aos usuários ‘misturar e combinar’ dispositivos de campo e sistemas host de vários fornecedores. Dispositivos Fieldbus® individuais também podem transmitir e receber informações multivariáveis, e se comunicar diretamente entre si através de um Fieldbus® comum, permitindo que novos dispositivos sejam adicionados ao Fieldbus® sem interromper os serviços.
Dados de processo aprimorados Com Foundation™ Fieldbus, múltiplas variáveis de cada dispositivo podem ser trazidas para o sistema de controle da planta para analisar tendências, otimizar processos e gerar relatórios. O acesso a dados precisos e de alta resolução permite que os processos sejam ajustados para melhor produtividade, menos tempo de inatividade e melhor desempenho da planta.
Visão geral do processo Dispositivos Fieldbus® modernos, com poderosas capacidades de comunicação baseadas em microprocessador, permitem que erros de processo sejam reconhecidos mais rapidamente e com maior certeza. Como resultado, os operadores da planta são notificados de condições anormais ou da necessidade de manutenção preventiva, permitindo que o pessoal considere decisões proativas. Eficiências operacionais mais baixas são corrigidas mais rapidamente, permitindo que a produção aumente enquanto os custos de matérias-primas e problemas regulatórios diminuem.
Segurança aprimorada na planta A tecnologia Fieldbus ajuda as plantas de fabricação a acompanhar os rigorosos requisitos de segurança. Pode fornecer aos operadores avisos antecipados de potenciais condições perigosas, permitindo assim que ações corretivas sejam tomadas para reduzir desligamentos não planejados. Capacidades aprimoradas de diagnóstico da planta também oferecem acesso menos frequente a áreas perigosas, minimizando assim os riscos para o pessoal.
Manutenção preditiva facilitada Capacidades aprimoradas de diagnóstico de dispositivos tornam possível monitorar e rastrear condições insidiosas como desgaste de válvulas e incrustação de transmissores. O pessoal da planta é capaz de realizar manutenção preditiva sem esperar por um desligamento programado, reduzindo ou mesmo evitando tempo de inatividade.
Redução de custos de fiação e manutenção O uso de fiação existente e conexões multi-drop fornece economias significativas nos custos de instalação de rede. Isso inclui reduções em barreiras de segurança intrínseca e custos de cabeamento, particularmente em áreas onde a fiação já está in situ.
Economias de custos adicionais podem ser alcançadas através do tempo reduzido necessário para construção e partida, bem como programação simplificada de funções de controle e lógica usando blocos de controle de software incorporados aos dispositivos Fieldbus®.
Produtos relacionados
Para modelos específicos de controladores e posicionadores Spirax Sarco, consulte o controlador SX80, o posicionador SP400, o posicionador inteligente SP500, posicionador eletropneumático EP5 e o posicionador eletropneumático EP500.